
航空機の旋回運動について、6自由度運動方程式を用いて解説する。
はじめに
航空機が旋回するメカニズムは「機体を旋回方向に傾けて、揚力の一部を向心力とすることで円運動を行う」と説明されることが多い。
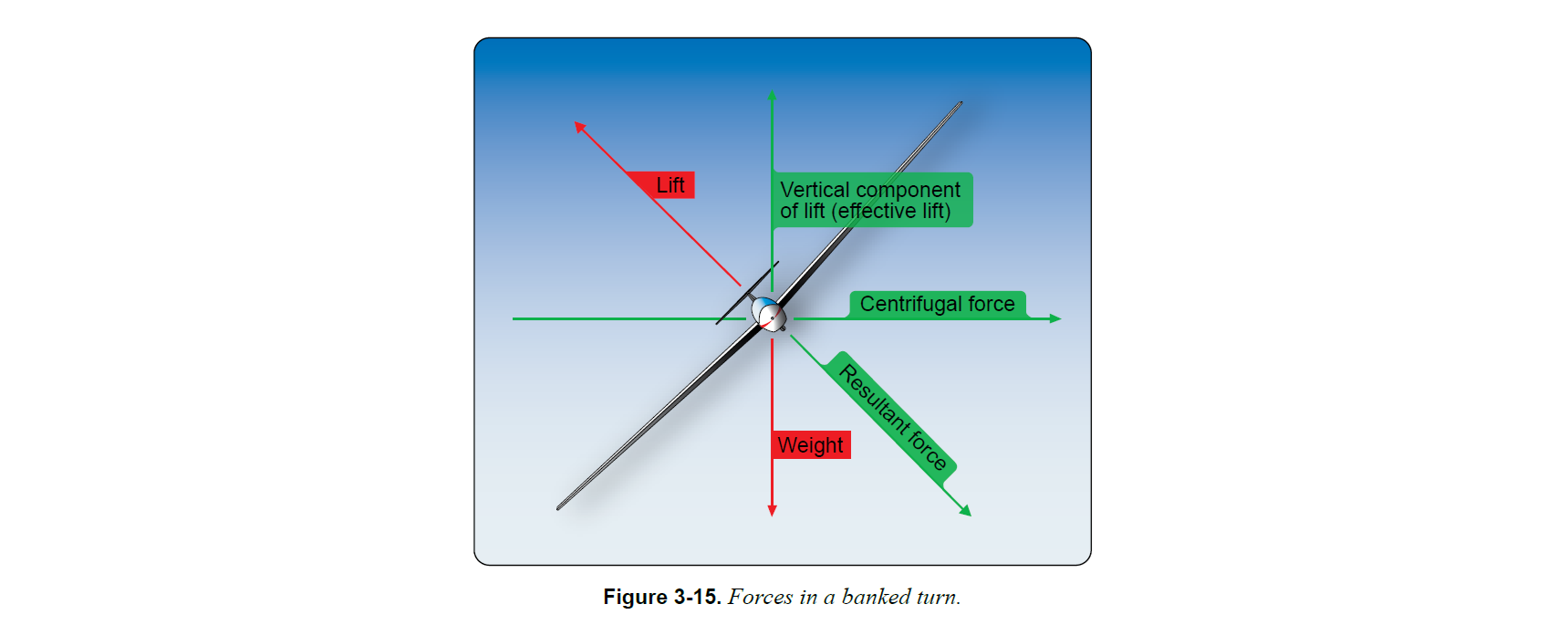
これはもちろん間違ってはいないのだが、この説明だけ聞くと「機体が傾くと必ず機体は旋回する」ように聞こえる。
だが、実際はそんなことはなく、機体を傾けても、旋回せずに直進飛行をすることができたりもする。
というわけで、この記事では「旋回運動とは何なのか」について、6自由度運動方程式を用いて解説する。
結論だけ一言でいうと、
航空機の旋回運動とは「 \(\dot{\psi} = \Omega\) を満たすように、 \(V, \alpha, \beta, \phi, \theta, \Omega, \delta_e, \delta_a, \delta_r, T\) を意図的に操作するマニューバ」である。
この記事では、次の順序で説明する。
- 座標系、状態量、6 自由度運動方程式を整理する。
- 空気力と空力モーメントを状態量と操舵入力の関数として定式化する。
- 定常旋回の運動学、高度維持条件、力とモーメントのつり合いを導く。
- 動力機の定常・高度維持旋回を、10 個のパラメータと 7 個の条件として整理する。
- 整理した定式化を 滑空機の定常降下旋回 と 旋回率をゼロとした定常横滑り へ拡張する。
- 協調旋回、wing-low sideslip、forward slip の数値例を確認する。
それではいってみよう。
航空機の6自由度運動方程式
旋回運動について理解する前に、基本となる航空機の6自由度運動方程式と、状態量について整理する。
まず、機体軸を次のように定義する。
\begin{align} x_b &: \text{前方} \\ y_b &: \text{右方} \\ z_b &: \text{下方} \end{align}
地球固定座標系は North-East-Down(北・東・下向,NED)座標系とする。
\begin{align} x_e &: \text{北} \\ y_e &: \text{東} \\ z_e &: \text{下} \end{align}
高度 \(h\) は、地球座標系の下向き座標 \(z_e\) を用いて、
\begin{align} h=-z_e \end{align}
である。
航空機の状態量は次のように置く。
\begin{align}
\mathbf{x} =\begin{bmatrix} u & v & w & p & q & r & x_e & y_e & z_e & \phi & \theta & \psi \end{bmatrix}^{\mathrm T}
\end{align}
ここで、各記号の意味は次のとおりである。
| 記号 | 意味 |
|---|---|
| \(u, v, w\) | 機体軸速度成分 |
| \(p, q, r\) | 機体軸角速度成分 |
| \(x_e, y_e, z_e\) | 地球座標系における位置 |
| \(\phi, \theta, \psi\) | 姿勢角(ロール・ピッチ・ヨー角) |
対気速度、迎角、横滑り角は次のように定義する。
\begin{align} V &= \sqrt{u^2+v^2+w^2} \\ \alpha &= \tan^{-1}\left(\frac{w}{u}\right) \\ \beta &= \sin^{-1}\left(\frac{v}{V}\right) \end{align}
\(V, \alpha, \beta\) から機体軸速度成分を書くと、
\begin{align} u &= V\cos\alpha\cos\beta \\ v &= V\sin\beta \\ w &= V\sin\alpha\cos\beta \end{align}
である。
\(u, v, w\) と \(V, \alpha, \beta\) は1対1で変換できるので、航空機の状態量は
\begin{align} \mathbf{x} =\begin{bmatrix} V & \alpha & \beta & p & q & r & x_e & y_e & z_e & \phi & \theta & \psi \end{bmatrix}^{\mathrm T} \end{align}
としても問題ない。
並進運動方程式は次の3式である。
\begin{align} \dot{u} &= rv-qw+\frac{X}{m}-g\sin\theta \\ \dot{v} &= pw-ru+\frac{Y}{m}+g\sin\phi\cos\theta \\ \dot{w} &= qu-pv+\frac{Z}{m}+g\cos\phi\cos\theta \end{align}
ここで、 \(X,Y,Z\) は重力を除いた外力、すなわち空気力・推力などの機体軸方向成分である。
回転運動方程式は
\begin{align} \dot{p} &= \frac{ I_z\left[L+(I_y-I_z)qr+I_{xz}pq\right] +I_{xz}\left[N+(I_x-I_y)pq-I_{xz}qr\right] }{I_xI_z-I_{xz}^2} \\ \dot{q} &= \frac{M+(I_z-I_x)pr-I_{xz}(p^2-r^2)}{I_y} \\ \dot{r} &= \frac{ I_{xz}\left[L+(I_y-I_z)qr+I_{xz}pq\right] +I_x\left[N+(I_x-I_y)pq-I_{xz}qr\right] }{I_xI_z-I_{xz}^2} \end{align}
である。
ここで、
\begin{align} \mathbf{I}_b =\begin{bmatrix} I_x & 0 & -I_{xz} \\ 0 & I_y & 0 \\ -I_{xz} & 0 & I_z \end{bmatrix} \end{align}
は慣性テンソルであり、通常の左右対称航空機では、
\begin{align} I_{xy}=0,\qquad I_{yz}=0 \end{align}
とみなせる。
機体軸速度 \((u,v,w)\) を地球座標系へ変換すると、位置の時間微分は次のようになる。
\begin{align}
\dot{x}_e &=u\cos\theta\cos\psi +v\left(\sin\phi\sin\theta\cos\psi-\cos\phi\sin\psi\right) +w\left(\cos\phi\sin\theta\cos\psi+\sin\phi\sin\psi\right) \\
\dot{y}_e &=u\cos\theta\sin\psi +v\left(\sin\phi\sin\theta\sin\psi+\cos\phi\cos\psi\right) +w\left(\cos\phi\sin\theta\sin\psi-\sin\phi\cos\psi\right) \\
\dot{z}_e &=-u\sin\theta+v\sin\phi\cos\theta+w\cos\phi\cos\theta
\end{align}
機体角速度 \((p,q,r)\) と Euler 角速度 \((\dot{\phi},\dot{\theta},\dot{\psi})\) の関係は、
\begin{align}
\dot{\phi} &= p+q\sin\phi\tan\theta+r\cos\phi\tan\theta \\
\dot{\theta} &= q\cos\phi-r\sin\phi \\
\dot{\psi} &= \frac{q\sin\phi+r\cos\phi}{\cos\theta}
\end{align}
である。
逆変換は、
\begin{align}
p &= \dot{\phi}-\dot{\psi}\sin\theta \\
q &= \dot{\theta}\cos\phi+\dot{\psi}\sin\phi\cos\theta \\
r &= -\dot{\theta}\sin\phi+\dot{\psi}\cos\phi\cos\theta
\end{align}
である。
以上、整理すると、航空機の状態量は
\begin{align} \mathbf{x}= \begin{bmatrix} u & v & w & p & q & r & x_e & y_e & z_e & \phi & \theta & \psi \end{bmatrix}^{\mathrm T} \end{align}
もしくは
\begin{align} \mathbf{x}= \begin{bmatrix} V & \alpha & \beta & p & q & r & x_e & y_e & z_e & \phi & \theta & \psi \end{bmatrix}^{\mathrm T} \end{align}
の12個であり、これらの状態量を用いた6自由度方程式は、次の12本の1階微分方程式で表すことができる。
\begin{align}
\dot{u} &= rv-qw+\frac{X}{m}-g\sin\theta \\
\dot{v} &= pw-ru+\frac{Y}{m}+g\sin\phi\cos\theta \\
\dot{w} &= qu-pv+\frac{Z}{m}+g\cos\phi\cos\theta \\
\\
\dot{p} &= \frac{ I_z\left[L+(I_y-I_z)qr+I_{xz}pq\right] +I_{xz}\left[N+(I_x-I_y)pq-I_{xz}qr\right] }{I_xI_z-I_{xz}^2} \\
\dot{q} &= \frac{M+(I_z-I_x)pr-I_{xz}(p^2-r^2)}{I_y} \\
\dot{r} &= \frac{ I_{xz}\left[L+(I_y-I_z)qr+I_{xz}pq\right] +I_x\left[N+(I_x-I_y)pq-I_{xz}qr\right] }{I_xI_z-I_{xz}^2} \\
\\
\dot{x}_e &=u\cos\theta\cos\psi +v\left(\sin\phi\sin\theta\cos\psi-\cos\phi\sin\psi\right) +w\left(\cos\phi\sin\theta\cos\psi+\sin\phi\sin\psi\right) \\
\dot{y}_e &=u\cos\theta\sin\psi +v\left(\sin\phi\sin\theta\sin\psi+\cos\phi\cos\psi\right) +w\left(\cos\phi\sin\theta\sin\psi-\sin\phi\cos\psi\right) \\
\dot{z}_e &=-u\sin\theta+v\sin\phi\cos\theta+w\cos\phi\cos\theta \\
\\
\dot{\phi} &= p+q\sin\phi\tan\theta+r\cos\phi\tan\theta \\
\dot{\theta} &= q\cos\phi-r\sin\phi \\
\dot{\psi} &= \frac{q\sin\phi+r\cos\phi}{\cos\theta}
\end{align}
12個の変数に対して12個の式が与えられているので、この方程式は閉じており、空気力 \(X,Y,Z\) とモーメント \(L,M,N\) が与えられれば、航空機の非線形6自由度運動をシミュレーションすることができる。
↓参考

- 航空機の6自由度剛体運動の状態量は12個
- 航空機の6自由度剛体運動の運動方程式+座標変換式は合計12個
- 12個の状態量に対して、12個の方程式があるので、未知数 \(X, Y, Z, L, M, N\) を与えることで方程式が閉じ、6自由度剛体運動を解くことができる。
空気力、空力モーメントの定式化
空気力と空力モーメントは、動圧 \(q=\frac{1}{2}\rho V^2\) 、代表面積 \(S\) 、代表長さを用いて無次元化する。
推力 \(T\) が機体軸 \(x\) 正方向に作用すると仮定すると、
\begin{align}
X &= T+q S C_X \\
Y &= q S C_Y \\
Z &= q S C_Z
\end{align}
また、機体軸まわりのモーメントは、
\begin{align}
L &= q S b C_l \\
M &= q S \bar{c} C_m \\
N &= q S b C_n
\end{align}
である。
空力係数は線形近似によって次のように表される。
\begin{align}
C_X &= -C_D\cos\alpha+C_L\sin\alpha \\
C_Y &= C_{Y\beta}\beta+C_{Y\hat{p}}\hat{p}+C_{Y\hat{r}}\hat{r}+C_{Y\delta_a}\delta_a+C_{Y\delta_r}\delta_r \\
C_Z &= -C_D\sin\alpha-C_L\cos\alpha
\end{align}
ここで、縦方向の揚力係数と抗力係数は、次のように表す。
\begin{align}
C_L &= C_{L0}+C_{L\alpha}\alpha+C_{L\hat{q}}\hat{q}+C_{L\delta_e}\delta_e \\
C_D &= C_{D0}+\frac{C_L^2}{\pi e AR}
\end{align}
モーメント係数は、
\begin{align}
C_m &= C_{m0}+C_{m\alpha}\alpha+C_{m\hat{q}}\hat{q}+C_{m\delta_e}\delta_e \\
C_l &= C_{l\beta}\beta+C_{l\hat{p}}\hat{p}+C_{l\hat{r}}\hat{r}+C_{l\delta_a}\delta_a+C_{l\delta_r}\delta_r \\
C_n &= C_{n\beta}\beta+C_{n\hat{p}}\hat{p}+C_{n\hat{r}}\hat{r}+C_{n\delta_a}\delta_a+C_{n\delta_r}\delta_r
\end{align}
である。
ここで、 \(\hat{p},\hat{q},\hat{r}\) は、
\begin{align} \hat{p} &= \frac{pb}{2V} \\ \hat{q} &= \frac{q\bar{c}}{2V} \\ \hat{r} &= \frac{rb}{2V} \end{align}
である。
このように、空気力、空力モーメントは機体の状態量に加えて、 \(\delta_e, \delta_a, \delta_r, T\) という4個の制御入力によって決まっている。
安定微係数は、状態量や舵角の微小変化に対して、空力係数やモーメント係数がどの程度変化するかを表す係数である。
| 記号 | 意味 |
|---|---|
| \(C_{L\alpha}\) | 迎角変化に対する揚力係数の変化率。 |
| \(C_{L\dot\alpha}\) | 迎角変化率に対する揚力係数の変化率。 |
| \(C_{L\hat{q}}\) | 無次元ピッチレートに対する揚力係数の変化率。 |
| \(C_{L\delta_e}\) | エレベータ舵角に対する揚力係数の変化率。 |
| \(C_{Y\beta}\) | 横滑り角に対する横力係数の変化率。 |
| \(C_{Y\hat{p}}\) | 無次元ロールレートに対する横力係数の変化率。 |
| \(C_{Y\hat{r}}\) | 無次元ヨーレートに対する横力係数の変化率。 |
| \(C_{Y\delta_a}\) | エルロン舵角に対する横力係数の変化率。 |
| \(C_{Y\delta_r}\) | ラダー舵角に対する横力係数の変化率。 |
| \(C_{m\alpha}\) | 迎角変化に対するピッチングモーメント係数の変化率。 |
| \(C_{m\dot{\alpha}}\) | 迎角変化率に対するピッチングモーメント係数の変化率。 |
| \(C_{m\hat{q}}\) | 無次元ピッチレートに対するピッチングモーメント係数の変化率。 |
| \(C_{m\delta_e}\) | エレベータ舵角に対するピッチングモーメント係数の変化率。 |
| \(C_{l\beta}\) | 横滑り角に対するローリングモーメント係数の変化率。 |
| \(C_{l\hat{p}}\) | 無次元ロールレートに対するローリングモーメント係数の変化率。 |
| \(C_{l\hat{r}}\) | 無次元ヨーレートに対するローリングモーメント係数の変化率。 |
| \(C_{l\delta_a}\) | エルロン舵角に対するローリングモーメント係数の変化率。 |
| \(C_{l\delta_r}\) | ラダー舵角に対するローリングモーメント係数の変化率。 |
| \(C_{n\beta}\) | 横滑り角に対するヨーイングモーメント係数の変化率。 |
| \(C_{n\hat{p}}\) | 無次元ロールレートに対するヨーイングモーメント係数の変化率。 |
| \(C_{n\hat{r}}\) | 無次元ヨーレートに対するヨーイングモーメント係数の変化率。 |
| \(C_{n\delta_a}\) | エルロン舵角に対するヨーイングモーメント係数の変化率。 |
| \(C_{n\delta_r}\) | ラダー舵角に対するヨーイングモーメント係数の変化率。 |
安定微係数は機体に固有の数値なので、機体形状が定まれば何かしらの方法で計算することができる
↓参考
- 航空機にはたらく力・モーメントは機体の状態量と 舵面・推力の入力を用いて線形に近似できる
- 舵面・推力の4つの入力 \(\delta_e, \delta_a, \delta_r, T\) (と機体の状態量)によって 力・モーメントが定まり、先述した12個の方程式によって航空機の運動が決定する。
これで、航空機の運動を記述するための全ての式がそろったので、次はこの式に適用する定常・高度維持旋回の条件について説明する。
定常・高度維持旋回の条件
長い長い前座がようやく終わったので、いよいよ本題に入る
これまでに説明してきた 12個の状態量・12個の方程式・4個の入力 に、以下の定常・高度維持旋回の条件を入れることで、どのように整理できるかを見ていこう
- 旋回運動の条件
- 高度維持の条件
- 力の釣り合い
- モーメントの釣り合い
それでは一つずつ説明していく
旋回運動の条件
旋回率は、地球座標系の鉛直軸まわりの方位角速度として、
\begin{align}
\dot{\psi} = \Omega
\end{align}
と定義する。
正の \(\Omega\) は、 \(\psi\) が増加する向き(右旋回)である。
方位角 \(\psi\) は時間に対して線形に変化する。
\begin{align} \psi(t)=\psi_0+\Omega t \end{align}
このとき、水平面内位置 \(x_e, y_e\) は平面運動として時間変化する。
速度 \(V\) 、旋回率 \(\Omega\) 、旋回半径 \(R\) 、とすると、水平面内の速度成分は
\begin{align}
\dot{x}_e &= V\cos \left(\psi_0+\Omega t\right) \\
\dot{y}_e &= V\sin \left(\psi_0+\Omega t\right)
\end{align}
であり、水平面内位置は
\begin{align}
x_e &= x_{e0}+R \sin\left(\psi_0+\Omega t\right) \\
y_e &= y_{e0}-R \cos\left(\psi_0+\Omega t\right)
\end{align}
と書ける。
\(x_e, y_e\) を微分すると
\begin{align}
\dot{x}_e &= R \Omega \cos\left(\psi_0+\Omega t\right) \\
\dot{y}_e &= -R \Omega \left\{-\sin\left(\psi_0+\Omega t\right) \right\}
\end{align}
となり、\(\dot{x}_e, \dot{y}_e\) の式との比較より \(V=R \Omega\) となることがわかる
一方で、\(\phi,\ \theta\) は一定である。よって、
\begin{align}
\dot{\phi} &= 0 \\
\dot{\theta} &= 0 \\
\dot{\psi} &= \Omega
\end{align}
を Euler 角速度から機体角速度への逆変換式
\begin{align} p &= \dot{\phi}-\dot{\psi}\sin\theta \\ q &= \dot{\theta}\cos\phi+\dot{\psi}\sin\phi\cos\theta \\ r &= -\dot{\theta}\sin\phi+\dot{\psi}\cos\phi\cos\theta \end{align}
に代入すると、
\begin{align} p &= -\Omega\sin\theta \\ q &= \Omega\sin\phi\cos\theta \\ r &= \Omega\cos\phi\cos\theta \end{align}
となる。
高度維持条件
高度維持とは、
\begin{align} \dot{z_e}=0 \end{align}
である。
位置の運動学方程式より、
\begin{align} \dot{z}_e=-u\sin\theta+v\sin\phi\cos\theta+w\cos\phi\cos\theta \end{align}
であるから、高度維持条件は、
\begin{align} -u\sin\theta+v\sin\phi\cos\theta+w\cos\phi\cos\theta=0 \end{align}
となる。
ここに、
\begin{align} u &= V\cos\alpha\cos\beta \\ v &= V\sin\beta \\ w &= V\sin\alpha\cos\beta \end{align}
を代入すると、
\begin{align} -V\cos\alpha\cos\beta\sin\theta +V\sin\beta\sin\phi\cos\theta +V\sin\alpha\cos\beta\cos\phi\cos\theta =0 \end{align}
である。\(V\neq0\) より、
\begin{align} -\cos\alpha\cos\beta\sin\theta + \sin\beta\sin\phi\cos\theta + \sin\alpha\cos\beta\cos\phi\cos\theta =0 \end{align}
となる。
これが、一般の横滑りを含む高度維持旋回の運動学的条件である。
力の釣り合い
並進運動方程式は、
\begin{align} \dot{u} &= rv-qw+\frac{X}{m}-g\sin\theta \\ \dot{v} &= pw-ru+\frac{Y}{m}+g\sin\phi\cos\theta \\ \dot{w} &= qu-pv+\frac{Z}{m}+g\cos\phi\cos\theta \end{align}
である。
定常旋回では、
\begin{align}
\dot{u}=\dot{v}=\dot{w}=0
\end{align}
なので、機体軸方向の力のつり合いは、
\begin{align} X &= m\left(qw-rv+g\sin\theta\right) \\ Y &= m\left(ru-pw-g\sin\phi\cos\theta\right) \\ Z &= m\left(pv-qu-g\cos\phi\cos\theta\right) \end{align}
である。
ここに、
\begin{align} u &= V\cos\alpha\cos\beta \\ v &= V\sin\beta \\ w &= V\sin\alpha\cos\beta \end{align}
\begin{align} p &= -\Omega\sin\theta \\ q &= \Omega\sin\phi\cos\theta \\ r &= \Omega\cos\phi\cos\theta \end{align}
を代入すると、
\begin{align} X &=m\left[ \Omega V\cos\theta \left(\sin\phi\sin\alpha\cos\beta-\cos\phi\sin\beta\right) +g\sin\theta \right] \\ Y &=m\left[ \Omega V\cos\beta \left(\cos\phi\cos\theta\cos\alpha+\sin\theta\sin\alpha\right) -g\sin\phi\cos\theta \right] \\ Z &=m\left[ -\Omega V\sin\theta\sin\beta -\Omega V\sin\phi\cos\theta\cos\alpha\cos\beta -g\cos\phi\cos\theta \right] \end{align}
となる。
推力 \(T\) が機体軸 \(x\) 正方向に作用すると仮定すると、
\begin{align} X &= T+q S C_X \\ Y &= q S C_Y \\ Z &= q S C_Z \end{align}
なので、力の釣り合いは、まず \(C_X,C_Y,C_Z\) を用いて、
\begin{align} T+q S C_X &=m\left[ \Omega V\cos\theta \left(\sin\phi\sin\alpha\cos\beta-\cos\phi\sin\beta\right) +g\sin\theta \right] \\ q S C_Y &=m\left[ \Omega V\cos\beta \left(\cos\phi\cos\theta\cos\alpha+\sin\theta\sin\alpha\right) -g\sin\phi\cos\theta \right] \\ q S C_Z &=m\left[ -\Omega V\sin\theta\sin\beta -\Omega V\sin\phi\cos\theta\cos\alpha\cos\beta -g\cos\phi\cos\theta \right] \end{align}
と書ける。
揚力係数 \(C_L\) と抗力係数 \(C_D\) で表すと、
\begin{align} C_X &= -C_D\cos\alpha+C_L\sin\alpha \\ C_Z &= -C_D\sin\alpha-C_L\cos\alpha \end{align}
なので
\begin{align}
T+q S\left(-C_D\cos\alpha+C_L\sin\alpha\right) &=m\left[ \Omega V\cos\theta \left(\sin\phi\sin\alpha\cos\beta-\cos\phi\sin\beta\right) +g\sin\theta \right] \\
q S \left(C_{Y\beta}\beta+C_{Y\hat{p}}\hat{p}+C_{Y\hat{r}}\hat{r}+C_{Y\delta_a}\delta_a+C_{Y\delta_r}\delta_r\right) &=m\left[ \Omega V\cos\beta \left(\cos\phi\cos\theta\cos\alpha+\sin\theta\sin\alpha\right) -g\sin\phi\cos\theta \right] \\
q S\left(-C_D\sin\alpha-C_L\cos\alpha\right) &=m\left[ -\Omega V\sin\theta\sin\beta -\Omega V\sin\phi\cos\theta\cos\alpha\cos\beta -g\cos\phi\cos\theta \right]
\end{align}
とも書ける。
非常にわかりにくいが、要するに「機体に働く空気力(左辺)」と「機体に働く慣性力・重力(右辺)」が釣り合っているということであり、慣性の法則より、旋回している航空機は同じ速度で旋回をし続ける(=定常旋回)ということである。
モーメントの釣り合い
回転運動方程式は、
\begin{align}
\dot{p} &= \frac{ I_z\left[L+(I_y-I_z)qr+I_{xz}pq\right] +I_{xz}\left[N+(I_x-I_y)pq-I_{xz}qr\right] }{I_xI_z-I_{xz}^2} \\
\dot{q} &= \frac{M+(I_z-I_x)pr-I_{xz}(p^2-r^2)}{I_y} \\
\dot{r} &= \frac{ I_{xz}\left[L+(I_y-I_z)qr+I_{xz}pq\right] +I_x\left[N+(I_x-I_y)pq-I_{xz}qr\right] }{I_xI_z-I_{xz}^2}
\end{align}
であり、式に機体軸角速度の2次の項(\(p^2, r^2, pr, qr, pq\))が含まれている(→ イナーシャカップリング)。
一方、空力モーメント \(L,M,N\) は、
\begin{align}
L &= q S b C_l \\
M &= q S \bar{c} C_m \\
N &= q S b C_n
\end{align}
と表される。ここで、モーメント係数を線形近似すると、
\begin{align}
C_l &=C_{l\beta}\beta +C_{l\hat{p}}\hat{p} +C_{l\hat{r}}\hat{r} +C_{l\delta_a}\delta_a +C_{l\delta_r}\delta_r \\
C_m &=C_{m0} +C_{m\alpha}\alpha +C_{m\hat{q}}\hat{q} +C_{m\delta_e}\delta_e \\
C_n &=C_{n\beta}\beta +C_{n\hat{p}}\hat{p} +C_{n\hat{r}}\hat{r} +C_{n\delta_a}\delta_a +C_{n\delta_r}\delta_r
\end{align}
であり、空力モーメントの線形近似に現れる機体軸角速度 \(p, q, r\) の項は一次である。
したがって、今回は、角速度の一次項は残し、角速度の二次項であるイナーシャカップリングは無視する近似を行う。
よって、角速度の二次の項を無視したときの機体軸周りのモーメントのつり合いは、
\begin{align}
\dot{p} &= \frac{I_zL+I_{xz}N}{I_xI_z-I_{xz}^2}=0 \\
\dot{q} &= \frac{M}{I_y}=0 \\
\dot{r} &= \frac{I_{xz}L+I_xN}{I_xI_z-I_{xz}^2}=0
\end{align}
なので、
\begin{align}
L = M= N = 0
\end{align}
つまり
\begin{align}
C_l &= C_{l\beta}\beta+C_{l\hat{p}}\hat{p}+C_{l\hat{r}}\hat{r}+C_{l\delta_a}\delta_a+C_{l\delta_r}\delta_r &=0 \\
C_m &= C_{m0}+C_{m\alpha}\alpha+C_{m\hat{q}}\hat{q}+C_{m\delta_e}\delta_e &=0 \\
C_n &= C_{n\beta}\beta+C_{n\hat{p}}\hat{p}+C_{n\hat{r}}\hat{r}+C_{n\delta_a}\delta_a+C_{n\delta_r}\delta_r &=0
\end{align}
である。
機体軸周りのモーメントは釣り合っており、航空機は角速度(≒旋回率)を維持したまま旋回を続けることになる。
注:イナーシャカップリングは、機体の角速度と角運動量の向きが一般には一致しないことによって生じる慣性連成項である。今回は角速度が小さいとして二次の微小項であるイナーシャカップリングを無視する近似を行ったが、低速・大バンク・高旋回率・大きな慣性をもつ機体では、この項が無視できない場合がある。
まとめ
よって、まとめると、航空機の12個の状態量は
\begin{align}
V &= V_0=\mathrm{constant} \\
\alpha &= \alpha_0=\mathrm{constant} \\
\beta &= \beta_0=\mathrm{constant} \\
\\
\phi &= \phi_0=\mathrm{constant} \\
\theta &= \theta_0=\mathrm{constant} \\
\psi &= \psi_0+\Omega t \\
\\
p &= -\Omega\sin\theta=\mathrm{constant} \\
q &= \Omega\sin\phi\cos\theta=\mathrm{constant} \\
r &= \Omega\cos\phi\cos\theta=\mathrm{constant} \\
\\
x_e &= x_{e0}+R \sin\left(\psi_0+\Omega t\right) \\
y_e &= y_{e0}-R \cos\left(\psi_0+\Omega t\right) \\
z_e &= \mathrm{constant}
\end{align}
となる
このうち、\(\psi,p,q,r,x_e,y_e\) は \(\Omega,\phi,\theta\) で記述でき、\(z_e\)は適当な高度を与えればいいので、定常・高度維持旋回における独立な状態量は \(V,\alpha,\beta,\phi,\theta,\Omega\) の6個であることがわかる。
これに、4個の制御入力を加えると、定常・高度維持旋回においては、
\begin{align}
V,\ \alpha,\ \beta,\ \phi,\ \theta,\ \Omega,\ \delta_e,\ \delta_a,\ \delta_r,\ T
\end{align}
の10個のパラメータがあることになる。
これに対して、方程式は、力のつり合い3式、モーメントのつり合い3式、高度維持条件1式の合計7式である。
\begin{align}
T+q S\left(-C_D\cos\alpha+C_L\sin\alpha\right) &=m\left[ \Omega V\cos\theta \left(\sin\phi\sin\alpha\cos\beta-\cos\phi\sin\beta\right) +g\sin\theta \right] \\
q S \left(C_{Y\beta}\beta+C_{Y\hat{p}}\hat{p}+C_{Y\hat{r}}\hat{r}+C_{Y\delta_a}\delta_a+C_{Y\delta_r}\delta_r\right) &=m\left[ \Omega V\cos\beta \left(\cos\phi\cos\theta\cos\alpha+\sin\theta\sin\alpha\right) -g\sin\phi\cos\theta \right] \\
q S\left(-C_D\sin\alpha-C_L\cos\alpha\right) &=m\left[ -\Omega V\sin\theta\sin\beta -\Omega V\sin\phi\cos\theta\cos\alpha\cos\beta -g\cos\phi\cos\theta \right]
\end{align}
\begin{align}
C_l &=C_{l\beta}\beta +C_{l\hat{p}}\hat{p} +C_{l\hat{r}}\hat{r} +C_{l\delta_a}\delta_a +C_{l\delta_r}\delta_r \approx0 \\
C_m &=C_{m0} +C_{m\alpha}\alpha +C_{m\hat{q}}\hat{q} +C_{m\delta_e}\delta_e \approx0 \\
C_n &=C_{n\beta}\beta +C_{n\hat{p}}\hat{p} +C_{n\hat{r}}\hat{r} +C_{n\delta_a}\delta_a +C_{n\delta_r}\delta_r \approx0
\end{align}
\begin{align}
-\cos\alpha\cos\beta\sin\theta +\sin\beta\sin\phi\cos\theta +\sin\alpha\cos\beta\cos\phi\cos\theta =0
\end{align}
パラメータの数が10個あるのに対して、方程式の数が3個足りないので、パラメータを3個固定してやれば、その3個のパラメータを用いて残りの7個のパラメータを連立で求めることができる。
例えば、
\(V=V_0,\ \Omega=\Omega_0,\ \beta=0\) とすれば、
- ある速度・ある旋回率で滑りなしの協調旋回(coordinated turn)をするために必要な \(\alpha,\theta,\delta_e,\delta_a,\delta_r,T\) がわかる。
\(V=V_0,\ \Omega=\Omega_0,\ \delta_a=0\) とすれば、
- ある速度・ある旋回率でラダーのみ旋回をするために必要な \(\alpha,\beta,\phi,\theta,\delta_e,\delta_r,T\) がわかる。
\(V=V_0,\ \Omega=\Omega_0,\ \phi=0\) とすれば、
- ある速度・ある旋回率でゼロバンク旋回(flat turn)をするために必要な \(\alpha,\beta,\theta,\delta_e,\delta_a,\delta_r,T\) がわかる。
ということになる。
このように、旋回運動とは「機体をバンクさせると当然のように旋回する」ものではなく、旋回率\(\dot{\psi}=\Omega\)の条件のもと、10個のパラメータの何をどのように固定するかをパイロットが恣意的に決定し操作する運動であり、協調旋回、ラダーのみ旋回、ゼロバンク旋回もすべて元を辿ればこの問題に帰結することになる
滑空機(グライダー)の場合
ここまでの式では、推力 \(T\) を含めて定常・高度維持旋回を整理してきた。
一方、滑空機(グライダー)を無動力で飛ばす場合は、基本的に
\begin{align} T=0 \end{align}
である。
このとき、静穏大気中で速度一定の定常飛行を考えると、滑空機は抗力によって失われる力学的エネルギーを推力で補うことができない。
そのため、滑空機の定常旋回は、水平面内で高度を保ち続ける旋回ではなく、一定の降下率をもって旋回する定常降下旋回となる。
もちろん、上昇気流、斜面上昇風、ウェーブ、曳航、モーターグライダーなどを考えれば、地面に対して高度が一定または増加する場合もあるが、ここでは、静穏大気中を無動力で滑空する場合を考える。
パラメータと方程式
動力機の定常・高度維持旋回では、主要なパラメータは
\begin{align} V,\ \alpha,\ \beta,\ \phi,\ \theta,\ \Omega,\ \delta_e,\ \delta_a,\ \delta_r,\ T \end{align}
の10個である。
滑空機では \(T=0\) なので、推力 \(T\) は未知のパラメータから外れる。したがって、定常降下旋回で考えるパラメータは、
\begin{align} V,\ \alpha,\ \beta,\ \phi,\ \theta,\ \Omega,\ \delta_e,\ \delta_a,\ \delta_r \end{align}
の9個になる。
方程式についても、高度維持条件
\begin{align} \dot{z}_e=0 \end{align}
が外れ、残るのは、力のつり合い3式と、モーメントのつり合い3式である。
したがって、滑空機の定常降下旋回は、9個のパラメータに対して6個の方程式を解く問題になる。
力のつり合いは、先ほどの式で \(T=0\) とおけばよく
\begin{align} q S\left(-C_D\cos\alpha+C_L\sin\alpha\right) &=m\left[ \Omega V\cos\theta \left(\sin\phi\sin\alpha\cos\beta-\cos\phi\sin\beta\right) +g\sin\theta \right] \\ q S \left(C_{Y\beta}\beta+C_{Y\hat{p}}\hat{p}+C_{Y\hat{r}}\hat{r}+C_{Y\delta_a}\delta_a+C_{Y\delta_r}\delta_r\right) &=m\left[ \Omega V\cos\beta \left(\cos\phi\cos\theta\cos\alpha+\sin\theta\sin\alpha\right) -g\sin\phi\cos\theta \right] \\ q S\left(-C_D\sin\alpha-C_L\cos\alpha\right) &=m\left[ -\Omega V\sin\theta\sin\beta -\Omega V\sin\phi\cos\theta\cos\alpha\cos\beta -g\cos\phi\cos\theta \right] \end{align}
モーメントのつり合いは、動力機の場合と同じく、
\begin{align} C_l &=C_{l\beta}\beta +C_{l\hat{p}}\hat{p} +C_{l\hat{r}}\hat{r} +C_{l\delta_a}\delta_a +C_{l\delta_r}\delta_r \approx0 \\ C_m &=C_{m0} +C_{m\alpha}\alpha +C_{m\hat{q}}\hat{q} +C_{m\delta_e}\delta_e \approx0 \\ C_n &=C_{n\beta}\beta +C_{n\hat{p}}\hat{p} +C_{n\hat{r}}\hat{r} +C_{n\delta_a}\delta_a +C_{n\delta_r}\delta_r \approx0 \end{align}
である。
この時点では、9個のパラメータに対して6個の方程式なので、動力機の場合と同じく、3個のパラメータを固定すれば残りを求める問題になる。
例えば、
\begin{align} V=V_0,\qquad \Omega=\Omega_0,\qquad \beta=0 \end{align}
とすれば、ある速度・ある旋回率で滑りなしの定常降下旋回をするために必要な \(\alpha,\phi,\theta,\delta_e,\delta_a,\delta_r\) が求まる。
降下率の計算
滑空機では、高度維持条件 \(\dot{z}_e=0\) を方程式として解く代わりに、解として得られた \(V,\alpha,\beta,\phi,\theta\) から
\begin{align} \dot{z}_e &= -V\cos\alpha\cos\beta\sin\theta +V\sin\beta\sin\phi\cos\theta +V\sin\alpha\cos\beta\cos\phi\cos\theta \end{align}
で降下率を計算する。
NED座標系では \(z_e\) は下向き正なので、滑空機が降下している場合は、通常
\begin{align}
\dot{z}_e>0
\end{align}
\begin{align}
\dot{h}<0
\end{align}
である。
つまり、滑空機の定常降下旋回では、\(V,\alpha,\beta,\phi,\theta,\Omega,\delta_e,\delta_a,\delta_r\) を決めると、力とモーメントのつり合いによって定常状態が決まり、その結果として \(\dot{z}_e\) または \(\dot{h}\) が決まる。
- 滑空機を静穏大気中の無動力飛行として扱う場合は \(T=0\) であり、定常降下旋回である。
- パラメータは \(T\) が外れて9個になり、方程式は高度維持条件 \(\dot{z}_e=0\) が外れて6個になる。
- 降下率は、解として得られた \(V,\alpha,\beta,\phi,\theta\) から運動学的に計算できる。
Sideslip
定常旋回の一般式で
\begin{align} \Omega=0 \end{align}
とすると、
\begin{align} \dot{\psi}=0 \end{align}
となり、機首方位は時間とともに変化しない。
このとき、機体軸角速度は、
\begin{align} p &= -\Omega\sin\theta=0, \\ q &= \Omega\sin\phi\cos\theta=0, \\ r &= \Omega\cos\phi\cos\theta=0 \end{align}
となる。
したがって、\(\Omega=0\) とした定常飛行は、機体姿勢を一定に保ち、機首方位を変えずに飛行する状態である。
ここで、速度とバンク角を
\begin{align} V &= V_0, \\ \Omega &= 0, \\ \phi &= \phi_0 \end{align}
と固定して、残りの状態量と舵角を力・モーメントのつり合いから求め、解として
\begin{align} \beta\neq0 \end{align}
が得られれば、機体をバンクさせたまま機首方位を変えずに飛行する定常横滑りが可能になる。
このような wing-low sideslip では、指定したバンク角 \(\phi_0\) に対して、横滑り角 \(\beta\)、姿勢角、必要舵角、推力または降下率が結果として求まる。
一方、速度と横滑り角を
\begin{align} V &= V_0, \\ \Omega &= 0, \\ \beta &= \beta_0 \end{align}
と固定することもできる。
この場合は、指定した横滑り角 \(\beta_0\) を保ちながら機首方位を変えない定常飛行を求めることになり、バンク角 \(\phi\)、姿勢角、必要舵角、推力または降下率が結果として求まる。
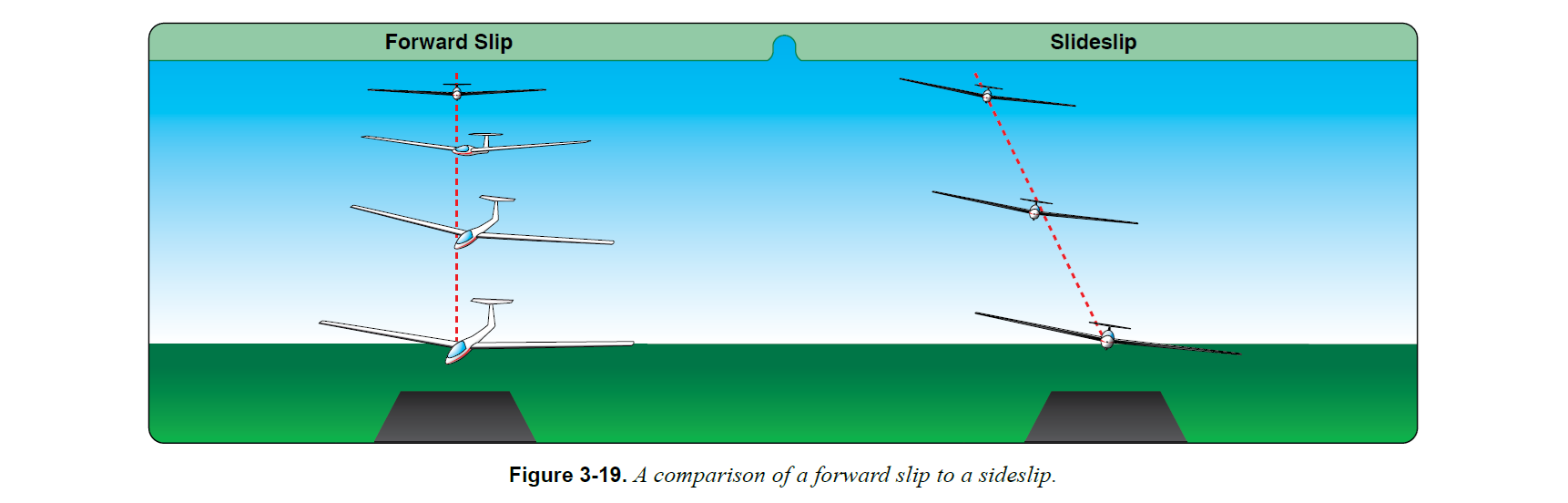
これが、いわゆる forward slip である。
wing-low sideslip と forward slip は、どちらも同じ定常横滑りの力学で表される。
一般には、横風補正などでバンク角を与えて飛行経路を保つ場合を wing-low sideslip、横滑りによって抵抗と降下角を増やす場合を forward slip と呼ぶ。
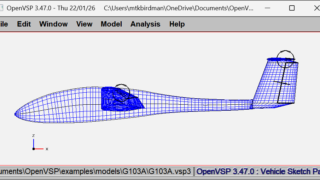
数値例
ここからは、Grob G103A を対象として、定常降下旋回と定常横滑りの数値例を確認する。
↓数値例を計算するプログラムの詳細はこちら
↓対象の機体はこちら
符号は次のように定義する。
\begin{align} \phi &> 0 &&:\text{右バンク}, \\ \Omega &> 0 &&:\text{右旋回}, \\ \delta_e &> 0 &&:\text{ピッチダウン}, \\ \delta_a &> 0 &&:\text{左ロール}, \\ \delta_r &> 0 &&:\text{左ヨー} \end{align}
以下の数値例では、速度を
\begin{align} V=30\ \mathrm{m/s}=108\ \mathrm{km/h} \end{align}
とし、滑空機として
\begin{align} T=0 \end{align}
を固定する。
数値例1:右バンク角 30 deg の協調旋回
まず、右バンク角を
\begin{align} \phi=30\ \mathrm{deg} \end{align}
横滑り角を
\begin{align} \beta=0\ \mathrm{deg} \end{align}
に固定した協調旋回を求める。
計算結果は次の通り。
| パラメータ | 計算結果 |
|---|---|
| 速度 \(V\) | \(30\ \mathrm{m/s}=108\ \mathrm{km/h}\) |
| バンク角 \(\phi\) | \(30\ \mathrm{deg}\) |
| 横滑り角 \(\beta\) | \(0\ \mathrm{deg}\) |
| 迎角 \(\alpha\) | \(3.452\ \mathrm{deg}\) |
| ピッチ角 \(\theta\) | \(1.276\ \mathrm{deg}\) |
| 旋回率 \(\Omega\) | \(10.847\ \mathrm{deg/s}\) |
| エレベータ舵角 \(\delta_e\) | \(-4.361\ \mathrm{deg}\) |
| エルロン舵角 \(\delta_a\) | \(1.016\ \mathrm{deg}\) |
| ラダー舵角 \(\delta_r\) | \(-2.912\ \mathrm{deg}\) |
| 推力 \(T\) | \(0\) |
| 降下率 | \(0.897\ \mathrm{m/s}\) |
\(\delta_e<0\) なのでエレベータはピッチアップ側、\(\delta_a>0\) なのでエルロンは左ロール側、\(\delta_r<0\) なのでラダーは右ヨー側である。
したがって、Grob G103A の右協調旋回では、定常状態を維持するためにエレベータを引き、わずかに左エルロンと右ラダーを使用する必要がある。
横滑り角は
\begin{align} \beta=0\ \mathrm{deg} \end{align}
であり、協調旋回として釣り合っている。
最大絶対残差は \(1.541014\times10^{-9}\) であり、数値解は十分に収束している。
数値例2:右バンク角 2 deg の wing-low sideslip
次に、旋回率を
\begin{align} \Omega=0\ \mathrm{deg/s} \end{align}
右バンク角を
\begin{align} \phi=2\ \mathrm{deg} \end{align}
に固定した wing-low sideslip を求める。
計算結果は次の通り。
| パラメータ | 計算結果 |
|---|---|
| 速度 \(V\) | \(30\ \mathrm{m/s}=108\ \mathrm{km/h}\) |
| 旋回率 \(\Omega\) | \(0\ \mathrm{deg/s}\) |
| バンク角 \(\phi\) | \(2\ \mathrm{deg}\) |
| 横滑り角 \(\beta\) | \(14.289\ \mathrm{deg}\) |
| 迎角 \(\alpha\) | \(2.554\ \mathrm{deg}\) |
| ピッチ角 \(\theta\) | \(1.469\ \mathrm{deg}\) |
| エレベータ舵角 \(\delta_e\) | \(3.573\ \mathrm{deg}\) |
| エルロン舵角 \(\delta_a\) | \(-2.820\ \mathrm{deg}\) |
| ラダー舵角 \(\delta_r\) | \(3.024\ \mathrm{deg}\) |
| 推力 \(T\) | \(0\) |
| 降下率 | \(0.808\ \mathrm{m/s}\) |
\(\Omega=0\) なので、機首方位は変化しない。
\(\delta_a<0\) なのでエルロンは右ロール側、\(\delta_r>0\) なのでラダーは左ヨー側である。
したがって、右エルロンと左ラダーの cross-control により、右バンクを保ったまま定常横滑り状態が成立している。
このとき、結果として得られる横滑り角は
\begin{align} \beta=14.289\ \mathrm{deg} \end{align}
である。
最大絶対残差は \(6.213773\times10^{-9}\) であり、数値解は十分に収束している。
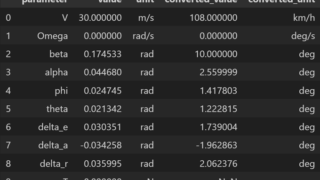
数値例3:横滑り角 10 deg の forward slip
最後に、旋回率を
\begin{align} \Omega=0\ \mathrm{deg/s} \end{align}
横滑り角を
\begin{align} \beta=10\ \mathrm{deg} \end{align}
に固定した forward slip を求める。
計算結果は次の通り。
| パラメータ | 計算結果 |
|---|---|
| 速度 \(V\) | \(30\ \mathrm{m/s}=108\ \mathrm{km/h}\) |
| 旋回率 \(\Omega\) | \(0\ \mathrm{deg/s}\) |
| 横滑り角 \(\beta\) | \(10\ \mathrm{deg}\) |
| バンク角 \(\phi\) | \(1.418\ \mathrm{deg}\) |
| 迎角 \(\alpha\) | \(2.560\ \mathrm{deg}\) |
| ピッチ角 \(\theta\) | \(1.223\ \mathrm{deg}\) |
| エレベータ舵角 \(\delta_e\) | \(1.739\ \mathrm{deg}\) |
| エルロン舵角 \(\delta_a\) | \(-1.963\ \mathrm{deg}\) |
| ラダー舵角 \(\delta_r\) | \(2.062\ \mathrm{deg}\) |
| 推力 \(T\) | \(0\) |
| 降下率 | \(0.818\ \mathrm{m/s}\) |
指定した横滑り角を維持するため、バンク角は
\begin{align} \phi=1.418\ \mathrm{deg} \end{align}
となる。
また、\(\delta_a<0\) なのでエルロンは右ロール側、\(\delta_r>0\) なのでラダーは左ヨー側である。
したがって、右エルロンと左ラダーの cross-control により、機首を飛行経路に対して左へ向けた forward slip が成立している。
最大絶対残差は \(2.417129\times10^{-9}\) であり、数値解は十分に収束している。
おわりに
航空機の旋回運動について、6自由度運動方程式を用いて解説した。
定常・高度維持旋回では、速度、迎角、横滑り角、バンク角、ピッチ角、旋回率、3 舵の舵角、推力の合計 10 個が主要パラメータである。
これに対して、力のつり合い 3 式、モーメントのつり合い 3 式、高度維持条件 1 式の合計 7 式を導出した。
したがって、旋回形態を定めるには 3 個のパラメータを固定し、残る 7 個を連立して求める必要がある。
また、\(T=0\) を固定し、高度維持条件を外すことで、定常降下旋回として整理することもできるし、旋回率を \(\Omega=0\) とすれば、機首方位を変えずに機体をバンクさせる wing-low sideslip と forward slip のトリム状態量も求められる。
次の記事では、この一般的な定常旋回問題に β=0 を加えた協調旋回と、δa=0 を加えたラダーのみ旋回を個別に整理する。
↓次の記事


↓関連記事



コメント