鳥コン滑空機の基本設計に使えるサイジング図を考える
はじめに
鳥コン滑空機の機体設計は、概念設計、基本設計、詳細設計の順に行われる
一番最初に行う概念設計で機体に対する要求を定め、それを実現できるような機体の形状をざっくりと決める
基本設計では、概念設計で決めた機体形状をもとに、鳥コン滑空機の性能を大きく左右する代表的な諸元である速度、翼面積、機体重量の値を設定する
これまで筆者が設計してきた機体(QX-20、Gemini-X)の基本設計においては、筆者の経験をもとに独断と偏見でなんとなく翼面積や機体重量を決めていた
一方、旅客機の基本設計では、サイジング図(sizing chart / matching chart)と呼ばれるグラフを用いて、旅客機の代表的な諸元である推力重量比T/Wと翼面荷重W/Sを決定している

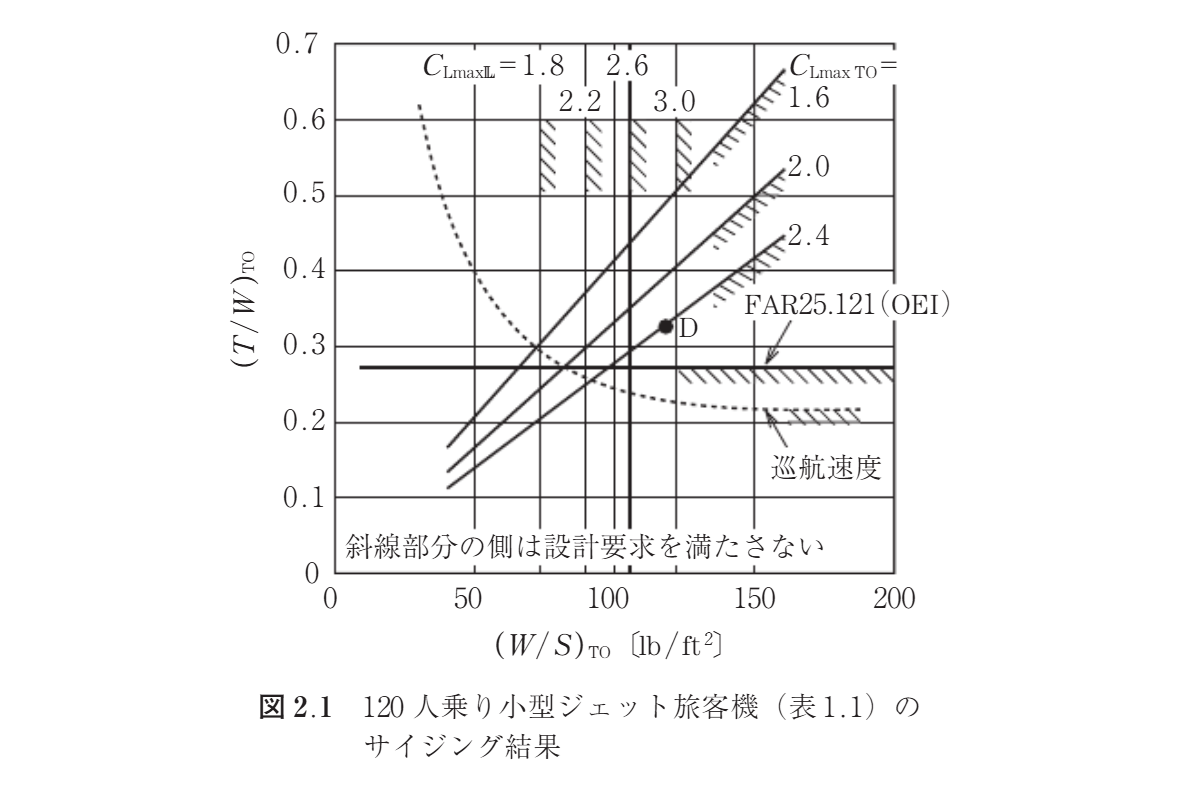
鳥コン滑空機も旅客機も飛行機であることに変わりないので、旅客機の設計のように鳥コン滑空機の基本設計に使えるサイジング図(巡航速度をもとに翼面積と機体重量を決定する図)を考えてみる
↓参考文献

結果
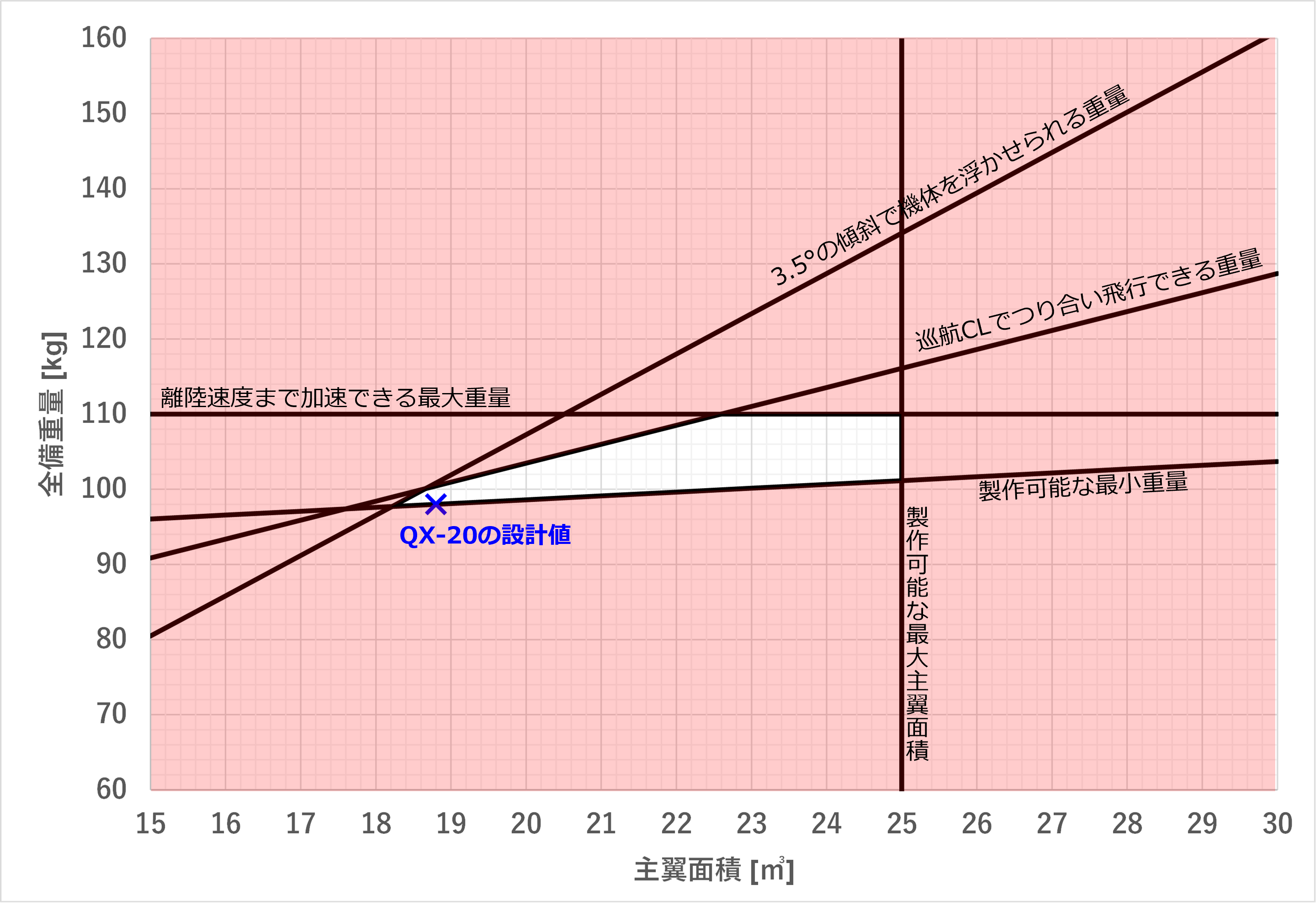
最終的にはこんな感じになる(白色の範囲が設計要求を満たす機体の存在可能領域)
視覚的に機体の存在可能領域が確認できるので、非常によいと思う
今回は、以下の5つの項目に対してサイジング図を作成してみた
- つりあい飛行
- 離陸引き起こし
- 最大離陸重量
- 製作可能な機体の最小重量
- 製作可能な主翼の最大面積
それでは、QX-20を例にして説明していく
インプット
サイジング図は基本設計で用いるものなので、設計要求および概念設計の結果がインプットになる
QX-20の設計要求は「初めてのパイロットでも操縦しやすく安全で,九大の強みを生かした琵琶湖唯一の新しい形状で,大会に出場できかつ優勝も狙えるような機体」であり、これを受けて概念設計は以下のようになった
- 低翼面荷重低速機(棒飛び機)
- 製作工程削減のため使いまわせるものは最大限使いまわす
- 低翼
- 高胴(左右対称)
- T字尾翼
- 乗り込み式
- 主桁は自作CFRPパイプ(楕円テーパー付き),水平尾翼桁はアルミマンドレルの自作CFRPパイプ,垂直安定板はカーボンDボックス
- 重心移動とラダーで操縦
今回のサイジング図は、巡航速度から機体重量と主翼面積を決定するものなので、巡航速度Vは9.5m/sとする
その他の諸元は以下の通り
- 離陸対地速度VTO:5.5 m/s
- 空気密度ρ:1.164 kg/㎥
- 重力加速度g:9.795 m/s2
- パイロット重量Wcrew:53 kg
- スパンb:25 m
つり合い飛行の条件
まずは一番大事な定常滑空における釣り合いの条件を考える
最終的な巡航CLは主翼を設計するまで分からないが、鳥コン滑空機のような超高アスペクト比の主翼のCLは二次元翼型のそれと大体同じになる
そのため、基本設計のサイジングの段階ではひとまず鳥コン滑空機によく用いられる翼型のL/D最大となるCLにしておけばよい
今回はとりあえずCL=1.0とする
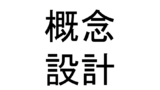
揚力の式より、巡航CL=1.0において、全備重量W [kg]と主翼面積S [m2]の関係は以下のようになる
\begin{align}
& C_{L}=\frac{Wg}{\frac{1}{2}\rho V^{2} S} \\\\
\rightarrow \quad
& W=\frac{\frac{1}{2}\rho V^{2} C_{L}}{g} S \simeq 2.524S
\end{align}
これをプロットすると以下のようになる
図の赤い部分(つり合い状態よりも重い or 主翼が小さい機体)は巡航CLで釣り合い飛行ができないことを意味しているため、サイジング図のプロットの右下が機体の存在可能領域になる
離陸引き起こしの条件
次は機体がプラホから離陸できる条件を考える
↓鳥コン滑空機の離陸についてはこちら

鳥コン滑空機は、プラホの端で離陸速度に到達し、完全に浮いた機体にパイロットが乗り込む(飛び乗る)のが理想である
鳥コンのプラホには3.5°の傾斜がついているため、機体軸を水平にしてプラホに沿って加速すると、機体の迎角は3.5°になる
鳥コン滑空機のような超高アスペクト比の機体の3次元揚力傾斜は、2次元翼の揚力傾斜の理論値2πと大体同じになるので、CLα=0.11/degとして考えると、離陸時の揚力係数CLTOは以下のようになる
\begin{align}
C_{L_{TO}}=C_{L_{cruise}}+C_{L_{\alpha}}\times 3.5 \simeq = 1.404
\end{align}
離陸速度をVTO=5.5 m/sとすると、離陸時に機体を完全に浮かせられる機体重量WEは以下のようになる
\begin{align}
& C_{L_{TO}}=\frac{W_{E}g}{\frac{1}{2}\rho V_{TO}^{2} S} \\\\
\rightarrow \quad
& W_{E}=\frac{\frac{1}{2}\rho V_{TO}^{2} C_{L_{TO}}}{g} S
\end{align}
全備重量Wはこれにパイロット重量Wcrewを足し込めばよいので
\begin{align}
W & =W_{E}+W_{crew} \\ & =W_{crew}+\frac{\frac{1}{2}\rho V_{TO}^{2} C_{L_{TO}}}{g} S
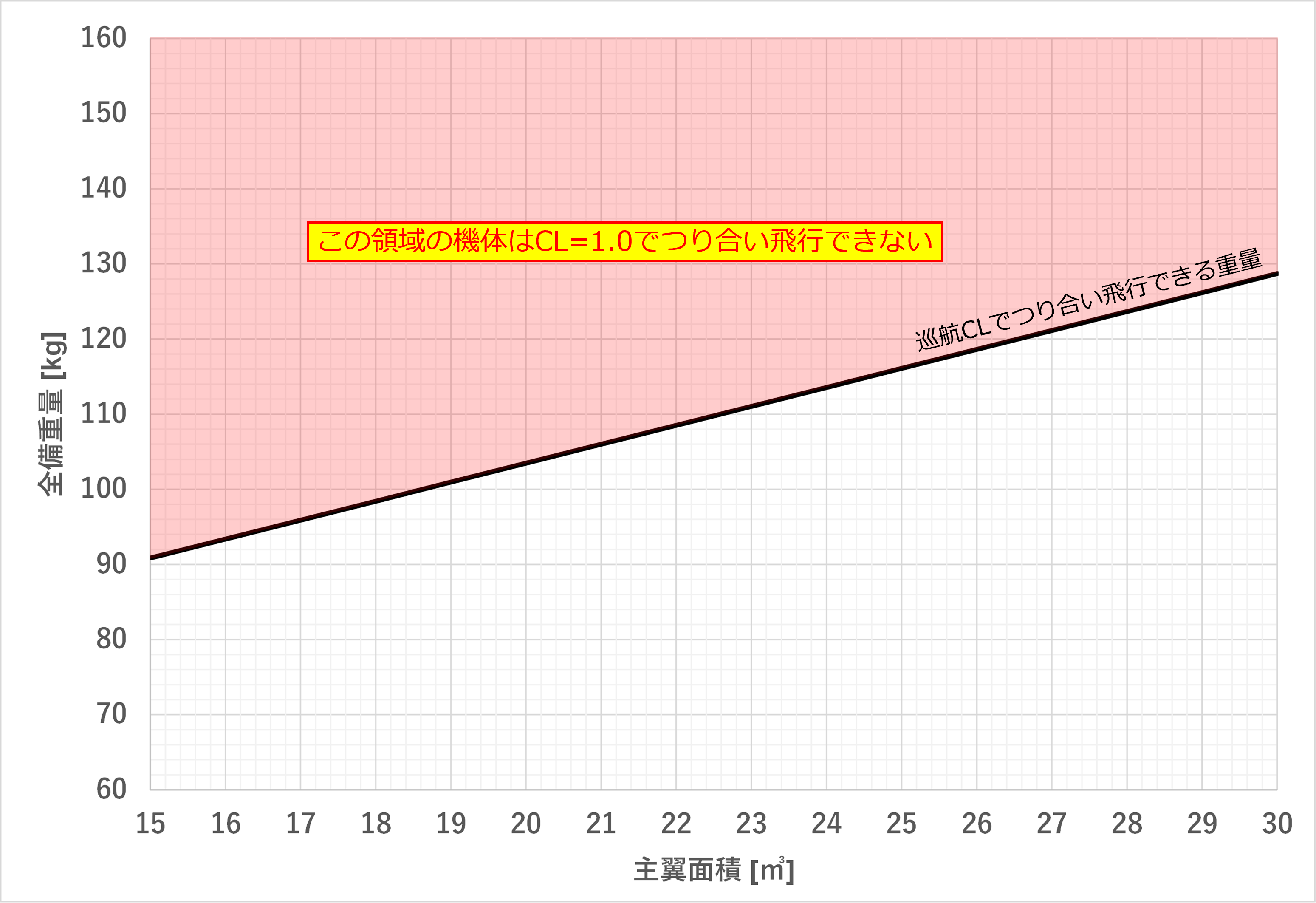
\simeq 53 + 5.3624S
\end{align}
これをプロットすると以下のようになる
図の赤い部分(離陸引き起こし上限よりも重い or 主翼が小さい機体)はプラホ端で機体を完全に浮かせることができないため、サイジング図のプロットの右下が機体の存在可能領域になる
最大離陸重量の条件
どこぞの2人乗り鳥コン滑空機が証明したように、プラホから飛び出しさえすれば全備重量の大きさに制限はない
そのため、機体重量の上限は、プラホの10mの離陸滑走で必要な離陸速度に到達できるかどうか、となる(対地)
どのくらいの重さまでなら必要な離陸速度まで加速できるのかについては、その年のフライトチームの筋力によるところが大きい
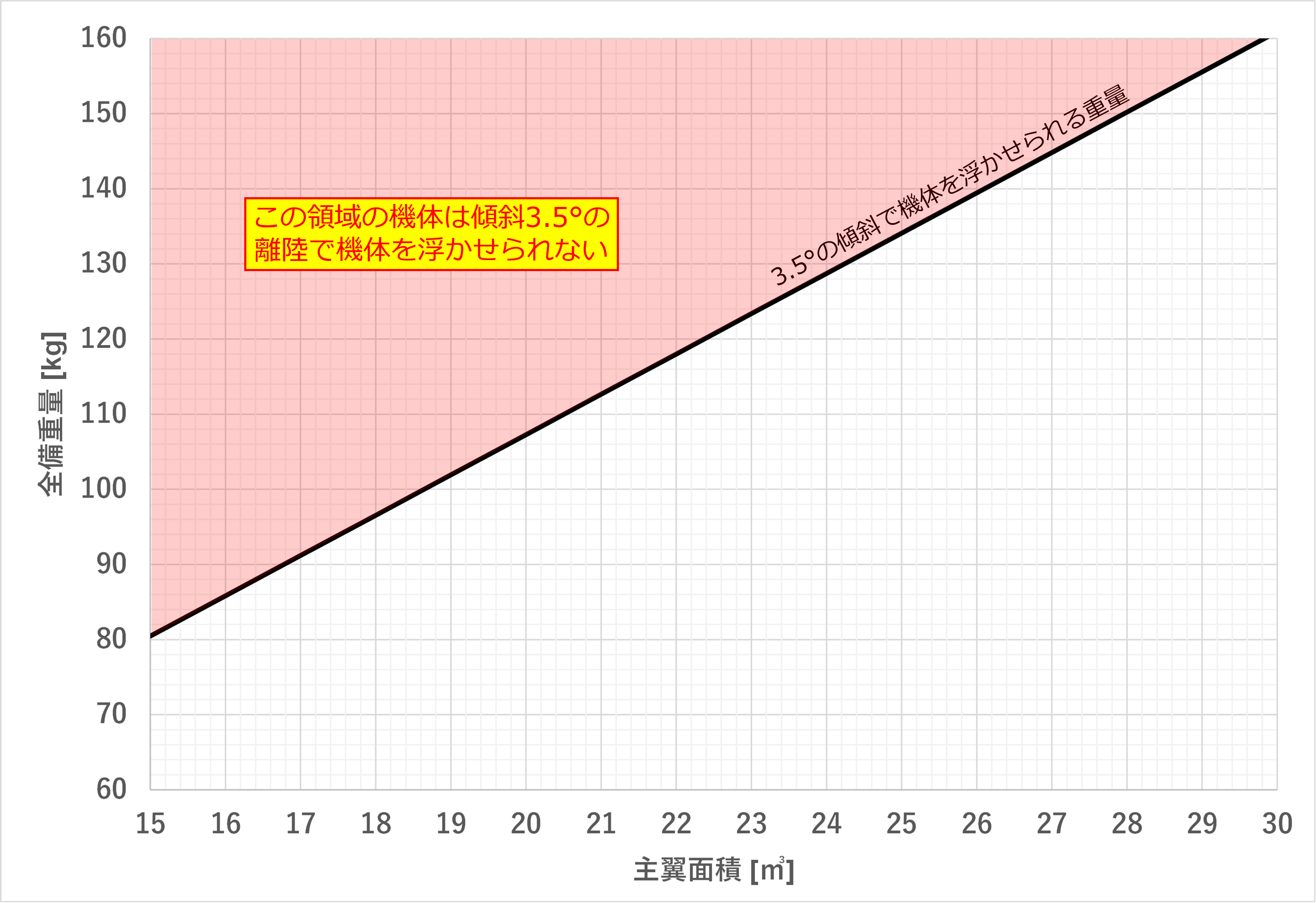
実際にサイジング図を作成するときは、バラストで重量を変更できるようにした乗り込み用練習機で計測してみるといいかもしれないが、今回はひとまず筆者の経験から110kgが最大離陸重量WTOmaxだとしておく
これをプロットすると以下のようになる
図の赤い部分(最大離陸重量より重い機体)はプラホ端で必要な離陸速度まで加速することができないため、サイジング図のプロットの下が機体の存在可能領域になる
製作可能な最小機体重量の条件
ここまではすべて機体重量が重い側の条件だったが、次は軽い側の条件を考えてみる
機体重量の下限は、そのチームの製作技術によって決まると考えらえる(必要な強度・剛性を確保した機体をどれだけ軽く設計・製作できるか)
そこで、サイジング図を描くために、機体重量WEを、主翼面積に比例する成分WESと比例しない成分WE0に分解する
今回の主翼面積のサイジングは、スパンを変えずにコード長を変化させて主翼面積を変える(アスペクト比を変える)イメージなので、主桁重量(∝スパン)は固定し、リブ、スキン、フィルム、後縁材、リブキャップなどの二次構造を主翼面積に比例する成分とする
QX-20の重量推算の結果を用いると、製作可能な最小機体重量WEは次のようになる
\begin{align}
W_{E}=W_{E_{0}}+W_{E_{S}}=W_{E_{0}}+w_{E_{S}} \times S
\end{align}
全備重量Wはこれにパイロット重量Wcrewを足し込めばよいので
\begin{align}
W & =W_{crew}+W_{E} \\ & =W_{crew}+W_{E_{0}}+w_{E_{S}} \times S
\simeq 53 + 35.422 + 0.510 S
\end{align}
これをプロットすると以下のようになる
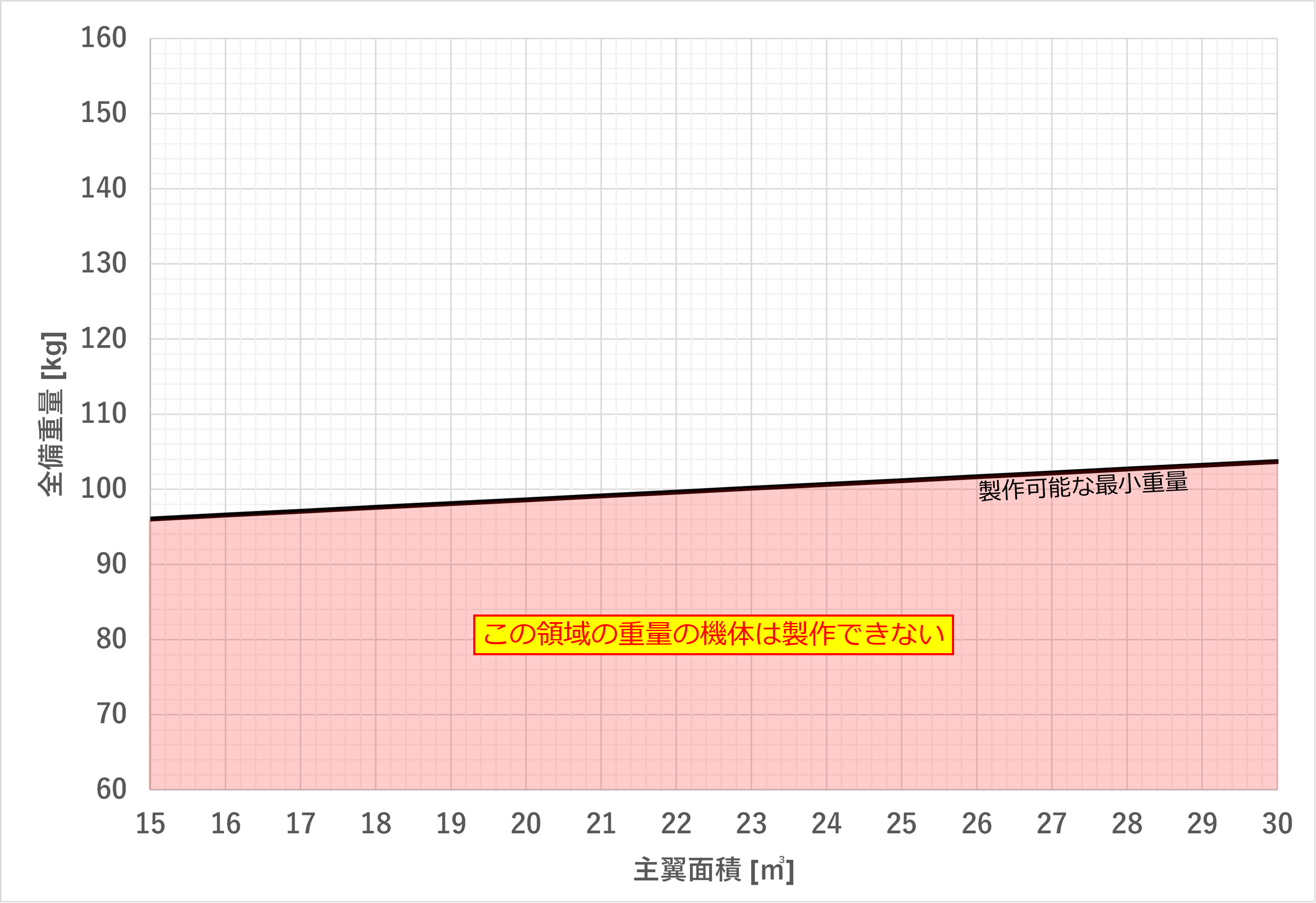
図の赤い部分(製作可能な最小機体重量より軽い機体)は自チームの技術では製作できないため、サイジング図のプロットの上が機体の存在可能領域になる
製作可能な最大主翼面積の条件
十分な揚力を確保できるなら無駄に主翼をデカくする必要はないことを考えると、これまでの4つのプロットで基本設計のサイジングは可能であるが、一応主翼面積の上限についても考えてみる
最大主翼面積は、前項の重量推算に用いた主翼構造をどこまで大きな主翼に適用できるかによって決まると考えられる
とりあえず筆者の感覚では、QX-20の主翼構造では学生時代に実績のないコード長1mを超えるような主翼の断面変形を十分に防ぐことはできないと思う
スパンは25mとしているので、コード長の上限が1mのとき、製作可能な主翼の最大面積は25㎡となる
これをプロットすると以下のようになる
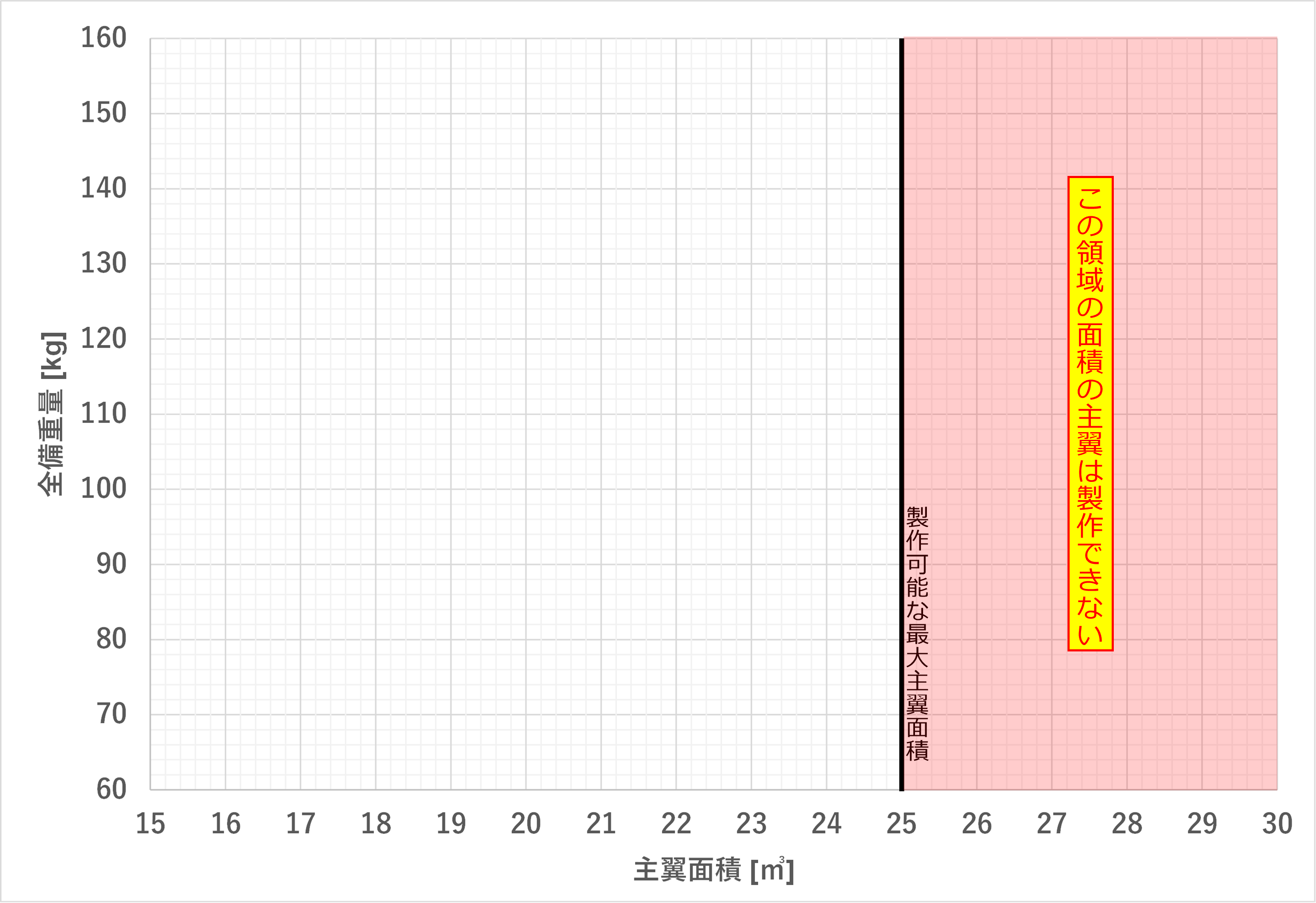
図の赤い部分(製作可能な最大主翼面積より大きい主翼)は自チームの技術では設計・製作できないため、サイジング図のプロットの左が機体の存在可能領域になる
サイジング図の作成と考察
5つのプロットを合体させるとこんな感じになる
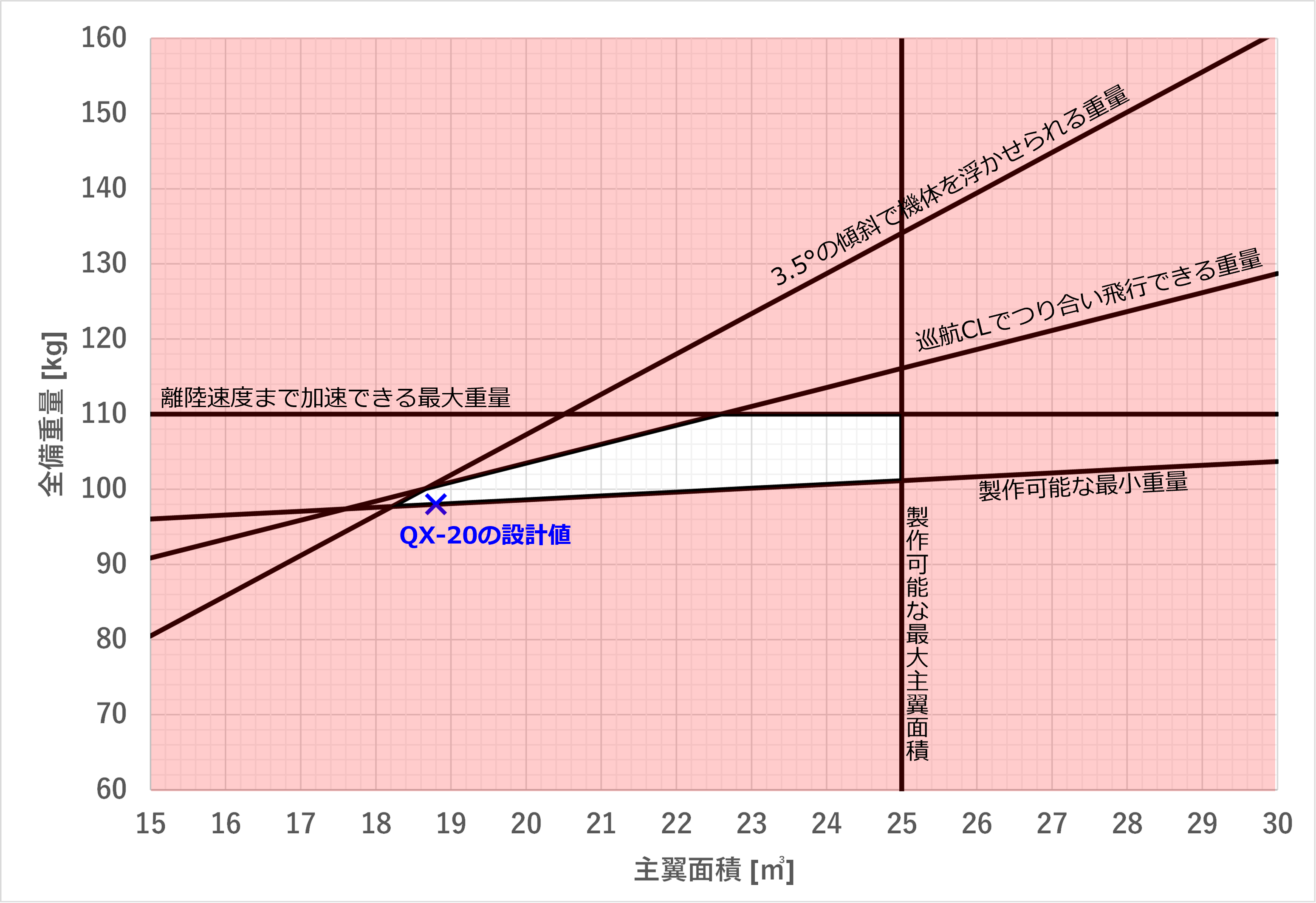
白色の範囲が設計要求を満たす機体の存在可能領域であり、QX-20の設計値はその中に納まっていることが分かる(当然)
以下、つらつらとサイジング図を作ってみた感想
QX-20は軽い
サイジング図を見てみると、QX-20は存在可能領域の中でもかなり軽い機体になっていることが分かる
QX-20は1年目の女性パイロットだったため、例年にはないほど軽量化に力を入れた機体になっているが、そのことがサイジング図からも読み取れる
重量のマージンは3㎏ほど
QX-20の主翼面積の設計値から上に進むと、約101kgのところで巡航CLの条件に当たっていることから、QX-20の重量のマージンは3㎏程であることが分かる
機体重量というのは作っていくうちになぜか重くなっていくものだが、「重量増加は許せて3㎏」と論理的にチームメンバーに示すことができるのもサイジング図の良いところかもしれない
実解ではあるが最適解ではない
参考文献にも書いてあるが、サイジング図によって決定された基本設計の値は、存在可能な値ではあるが最適な値ではない
今回サイジング図を作っていく過程で、L/Dなどの飛行性能に関する話が全く出てきていないのがその証拠である
本来は、機体の存在可能領域の中から数点の設計点を選び、それぞれについてL/Dなどを計算し、一番性能の良い機体を選ぶとよいと思われる
おわりに
鳥コン滑空機の基本設計に使えるサイジング図を考えた
実際の旅客機などに用いられている開発手法は世界中の先達の叡智の結集なので、鳥コン滑空機もできるだけ同じ手法に則って開発していきたい
↓関連記事
コメント