QX-20の尾翼の詳細設計について説明する
はじめに
尾翼の設計は「航空機のトリム,安定性,操縦性に関する要求を満たす」という繰り返しのプロセスであり,主翼の詳細設計の後に行われる
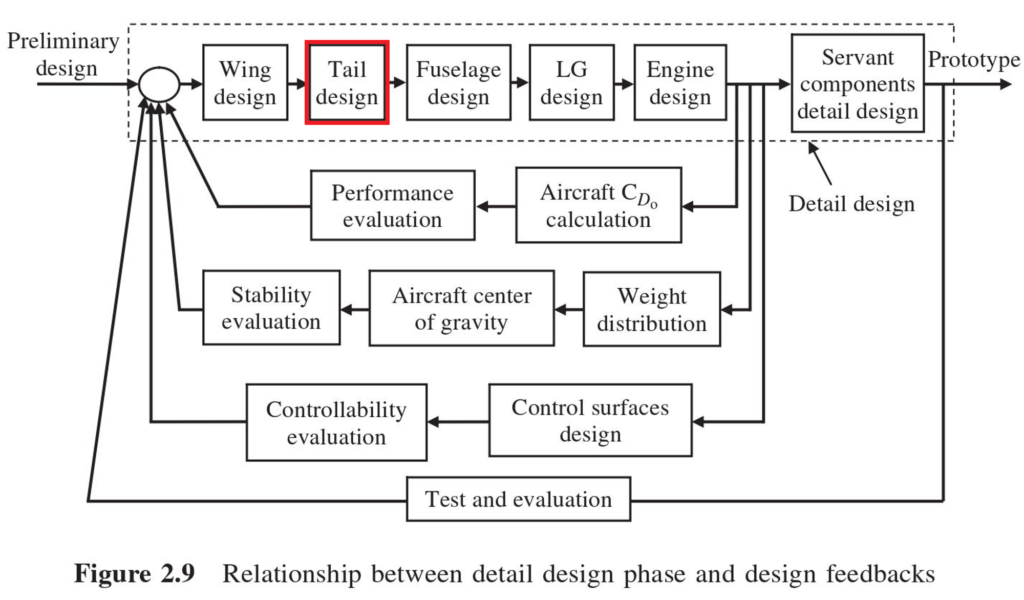
尾翼の設計の後にカウルと胴体の設計を行うため,後から尾翼の設計を変更することもよくある
また,主翼の設計の結果を受けて尾翼の設計を行うため,主翼の設計を変更した場合は必ず尾翼の設計を見直す必要がある
上でも述べたが,尾翼設計ではトリム,安定性,操縦性において次の要求を満たす必要がある
- トリム:重心まわりのピッチングモーメントがゼロ.\(\sum M_{cg}=0\)
- 安定性:縦の静安定性を有する.\(C_{m_{\alpha}}<0\)
- 操縦性:琵琶湖で安全にフライトするための操縦性を有する
水平尾翼の設計プロセスを以下に示す
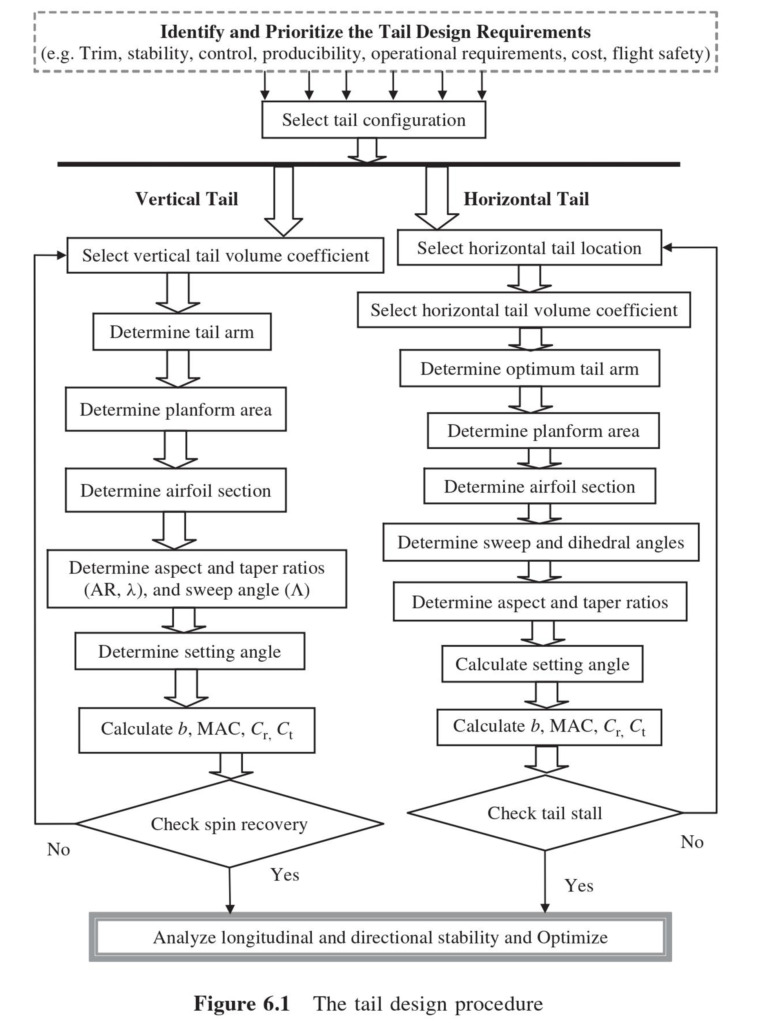
主翼の設計と共通する部分は多い
QX-20の尾翼詳細設計
尾翼詳細設計の前に,概念設計,基本設計で決定したことを確認しておく
- 製作工程削減のため使いまわせるものは最大限使いまわす
- T字尾翼
- 水平尾翼桁はアルミマンドレルの自作CFRPパイプ,垂直安定板はカーボンDボックス
- 重心移動とラダーで操縦
この要求を満たすように尾翼の詳細設計を行っていく
それではそれぞれについて解説していく
水平尾翼
まず,水平尾翼の設計から行う
鳥コン滑空機の水平尾翼設計について,鳥コン出場者ガイドブックでは次のように述べている
水平尾翼
鳥人間コンテスト出場者ガイドブックp.17より引用
尾翼はアスペクトレシオ(縦横比)が小さいので飛行中は失速しません.尾翼の取り付け場所は,可動翼の場合は主翼桁から4∼5m,重心移動式の場合は3.5m位が良いでしょう.垂直尾翼の面積はおよそ1㎡位です.尾翼のみで操縦する場合は,秒速10mで飛行し最大14度動かすと,11㎏位の力が出ます.秒速13mでは19㎏.水平尾翼も2㎡位の面積で最大14度動かすと22~36㎏ぐらいです
(中略)
固定式の水平尾翼は飛行中に取付角度などが変化しないような方法で確実に取り付けること,取付角度は主翼に対してマイナス6度が最適です.例えば主翼はプラス3度,尾翼はマイナス3度などです.
QX-19までは水平尾翼の設計は尾翼班が担当していたが,QX-20では筆者が担当した
水平尾翼の設計手順は次のようになる
- 水平尾翼の高さ\(h_{t}\)の決定
- 水平尾翼容積比\(V_{H}\)の決定
- モーメントアーム\(l_{t}\)の決定
- 水平尾翼面積\(S_{t}\)の決定
- 翼型の決定
- アスペクト比とテーパー比の決定
- 取り付け角\(i_{t}\)の決定
- (全機計算)
- トリム,安定性が要求を満たしているかの確認
- 2~9を無限に繰り返す
参考までにQX-13∼QX-20の水平尾翼の諸元を示す
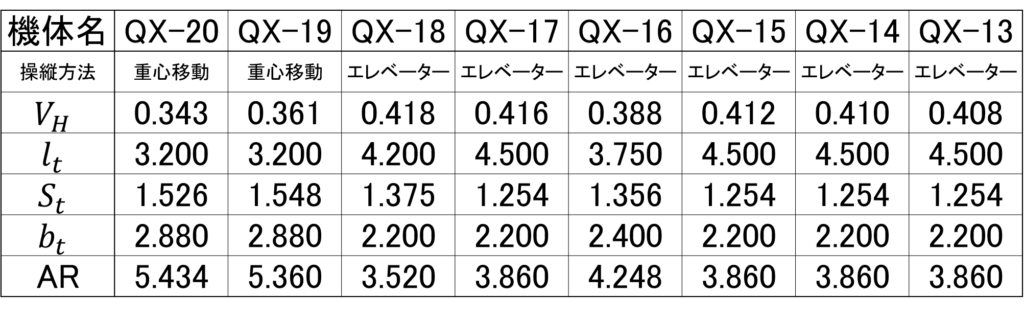
それぞれ説明していく
水平尾翼の高さ\(h_{t}\)の決定
QX-20ではT字尾翼を採用したので,ディープストールに陥らないようにする必要がある
ディープストールについてのWikipediaを引用する
ディープストールは飛行機のデザイン[3]、また特殊な操縦によって生じる特に危険な失速のことである。飛行機のデザインでいえば、特に垂直尾翼(垂直安定板)の先端付近に水平尾翼がある「T字尾翼機」に生じやすい。この翼配置では、失速により生じた主翼の乱流後流が水平尾翼を包み、昇降舵が機能しなくなる。通常は飛行機が失速すると機首下げモーメントがおこり飛行機は自動的に失速状態から回復するのに対し、この場合は前述の理由により機首上げモーメントが発生し、かつその状態で昇降舵の機能が失われるため、操縦によって失速状態から脱することが極めて困難となる。
Wikipediaより引用
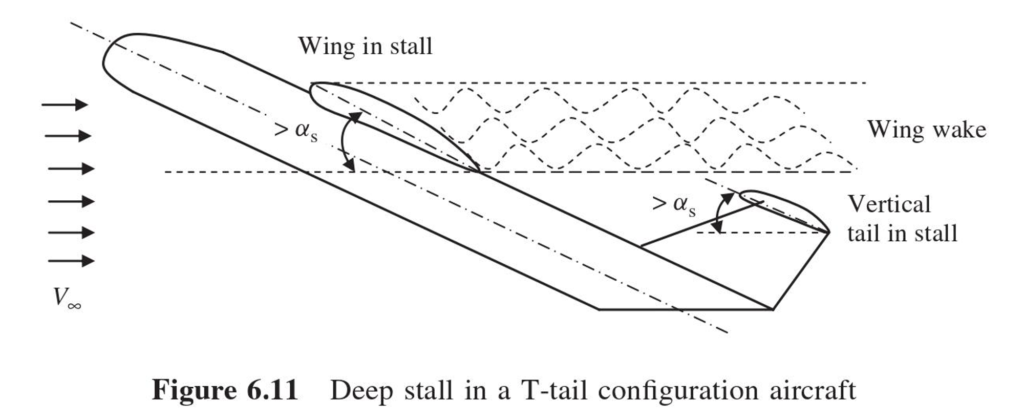
T字尾翼機でディープストールに陥らないようにするには水平尾翼を「失速した主翼後流の影響範囲外」に配置する必要がある
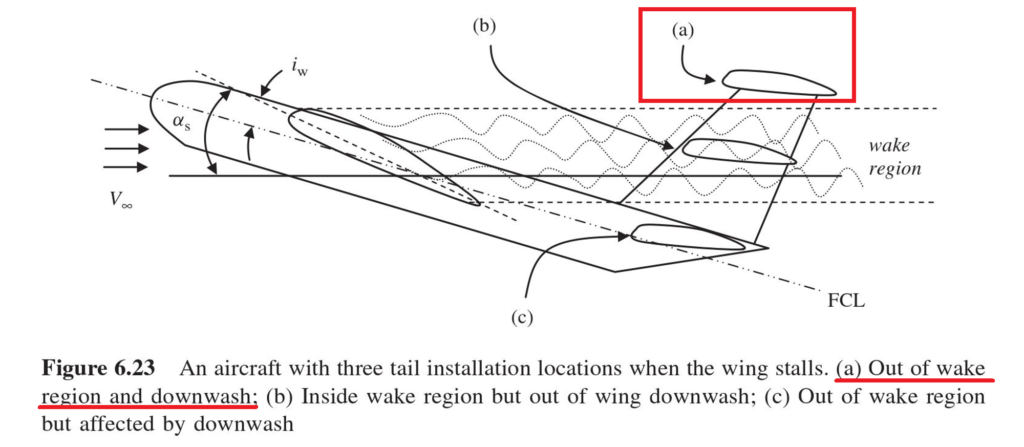
それでは実際どのくらい水平尾翼の高さ\(h_{t}\)を確保すれば「失速した主翼後流の影響範囲外」になるのかが問題だが,Aircraft Design: A Systems Engineering Designで次の実験式が紹介されていた
\begin{eqnarray}
h_{t}=l_{t}\times tan{(\alpha_{s}-i_{w}+3)}
\tag{6.61}
\end{eqnarray}
ここで,\(\alpha_{s}\)は主翼の失速角 [deg],\(i_{w}\)は主翼の取り付け角 [deg],\(l_{t}\)は水平尾翼のモーメントアーム[m]である
式(6.61)に,\(\alpha_{s}=18.0 [deg], i_{w}=3.5, l_{t}=3.2 [m]\)を代入すると,\(h_{t}=1.0 [m]\)となる
QX-20では最終的に\({\bf h_{t}=1.27 [m]}\)を採用した
T字尾翼を採用するにあたり,実際にどのくらいの高さにすれば主翼の後流の外に出たことになるのかをかなりいろいろな文献を調べたが,調べた文献の中で具体的な値や式を提示してくれたのは「Aircraft Design: A Systems Engineering Approach」だけだった
式(6.61)なしではT字尾翼の設計ができなかったであろうことを考えると,九大がQX-20でT字尾翼に挑戦できた一番の立役者は「Aircraft Design: A Systems Engineering Approach」だといっても過言ではない
水平尾翼容積比\(V_{H}\)の決定
水平尾翼容積比\(V_{H}\)を決定する
水平尾翼容積比は機体の安定性に影響する重要な要素である
ちなみに九大の設計では\(V_{H}\)は水平尾翼のモーメントアーム\(l_{t}\)を用いる.(白本や青本では主翼と水平尾翼の空力中心間距離を用いた水平尾翼容積比\(V_{H}^{*}\)も出てくるが,ややこしいので使わない)
QX-20ではT字尾翼を採用しており,水平尾翼効率\(\eta_{t}=1.0\)と考えることができるため,例年よりもやや小さい\({\bf V_{h}=0.343}\)とした
モーメントアーム\(l_{t}\)の決定
水平尾翼のモーメントアーム\(l_{t}\)を決定する
QX-20では,QX-19と同様に\({\bf l_{t}=3.2 [m]}\)とした
胴体を切り詰める主な理由は,機体の縦方向の慣性モーメント\(I_{yy}\)をできる限り小さくして操縦性をハンググライダーに近づけるためである
例えば,QX-20の縦の慣性モーメントの推算値は\(I_{yy}=59 [kg/m^{2}]\)だが,モーメントアームの値を\(l_{t}=4.0 [m]\)に変更すると\(I_{yy}=75 [kg/m^{2}]\)にまで増加する
水平尾翼面積\(S_{t}\)の決定
水平尾翼面積\(S_{t}\)を決定する
QX-20では,QX-19を参考に\({\bf S_{t}=1.526 [m^{2}]}\)とした
だいたい昨年と同じにしておけば問題ない
翼型の決定
水平尾翼に使用する翼型を決定する
エレベーターとして使用するなら翼型はNACA0012一択だろう
水平尾翼を固定するなら対称翼のNACA0012か,QX-19のように非対称翼のSD8040を逆さ向きにして使用するという選択肢がある
トリム飛行に必要な水平尾翼の揚力係数は\(C_{L_{tail}}=-0.150\)なので,NACA0012とSD8040の性能をCl=0.150付近で比較する

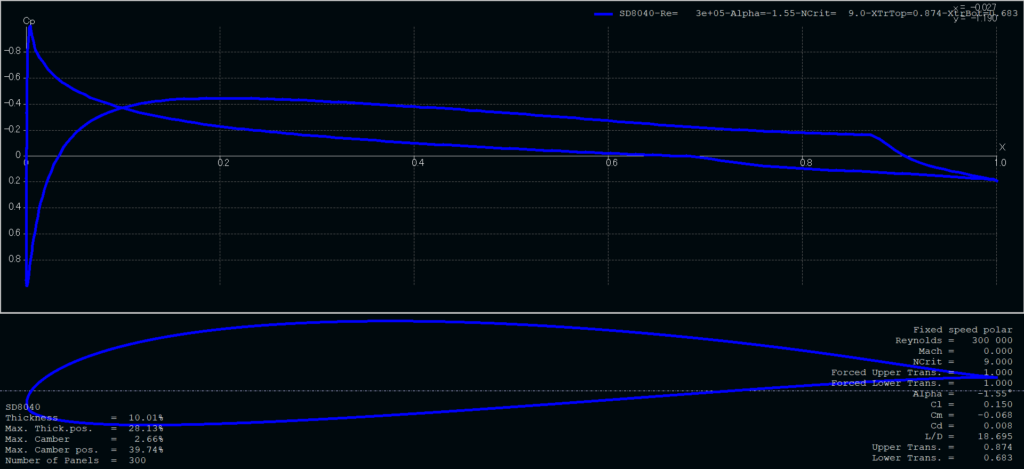
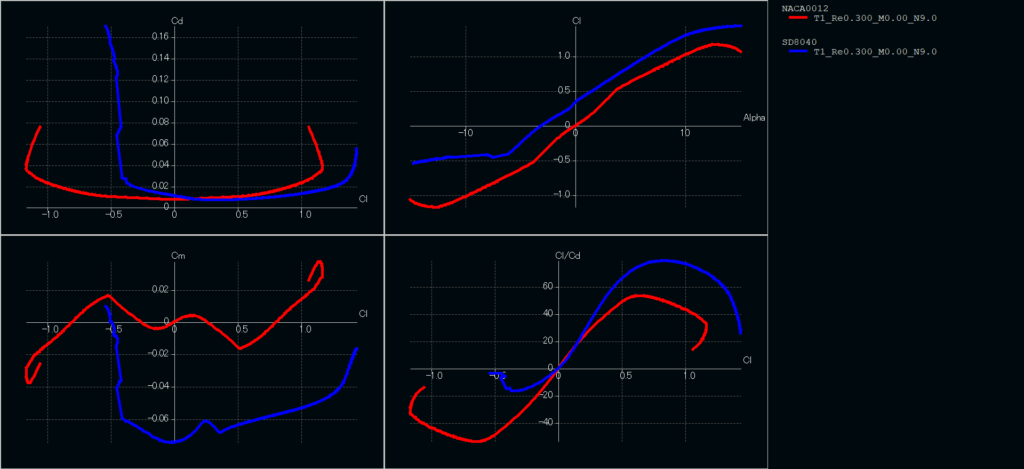
いまいち分かりにくいのでL/D-Cl線図を拡大してみる
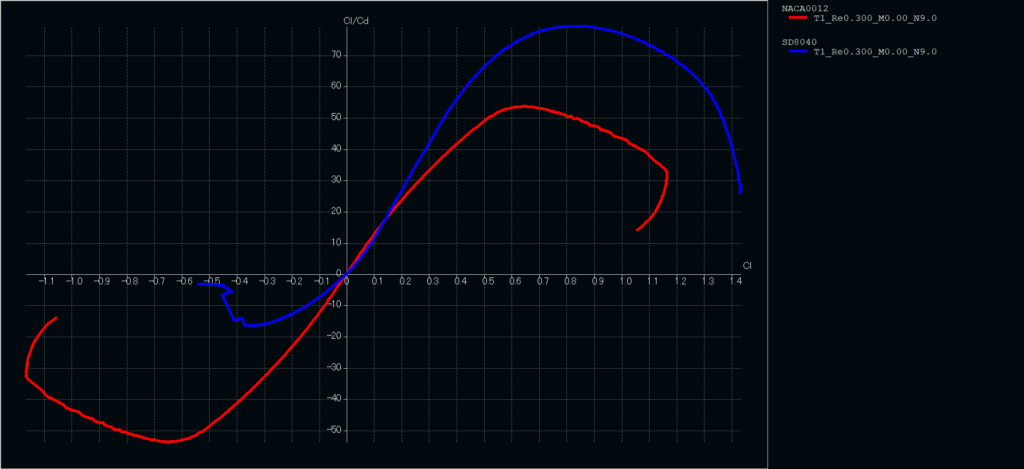
ちょうどCl=0.15付近で2つの翼型の性能が同じくらいになっている
性能的にはどちらも大差なかったので,QX-20では作りやすいNACA0012を採用した
アスペクト比とテーパー比の決定
水平尾翼のアスペクト比とテーパー比を決定する
といってもすでに水平尾翼面積は決定しているので実際は水平尾翼のスパンを決定することになる
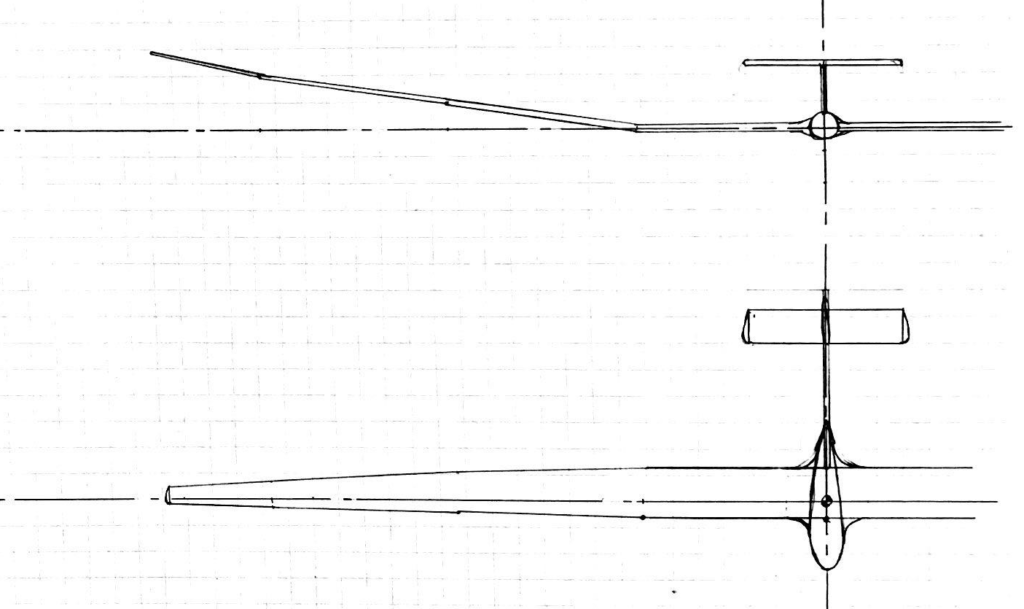
QX-20の水平尾翼のスパンはQX-19と同じ\({\bf b_{t}=2.880 [m],AR=5.434}\)とした.(実際にはこれにウィングレットがつくためスパンは約3mになる)
ちなみに水平尾翼スパン3mは九大の琵琶湖における運用上の限界である
九大では鳥コン当日,九大総務から借りたテントの中で胴体,電装,脚,尾翼を組み立てるが,テントの脚と脚の間隔が3mちょいなので,水平尾翼のスパンが3mを超えるとテントの中から機体が出せなくなる

次にテーパー比を決定する
そもそも水平尾翼の誘導抗力は約0.1 [N]しかないので,いくら水平尾翼の循環を楕円分布にしたところで全機で見れば変化はゼロに等しい
水平尾翼にテーパーを用いるのは誘導抗力を減らすためではなく,翼根の曲げモーメントを減らしてたわみを抑える構造的な意味合いが強い
QX-20ではT字尾翼を採用したため,新構造の設計・製作などで尾翼班に大きな負担がかかることが予想された
尾翼班の負担を少しでも減らすために,QX-20では製作の容易な矩形翼を採用した
実際に三面図を書いてみたが,アスペクト比が5.3もあれば矩形翼でもほとんど違和感はない
取り付け角\(i_{t}\)の決定
全機計算を行いながら取り付け角を決定する
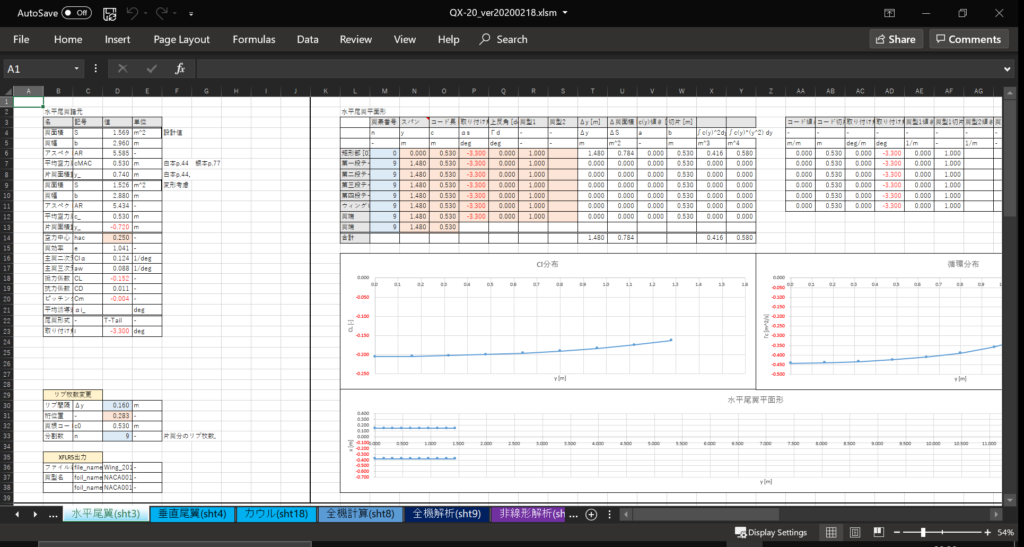
設計シートの使い方
平面形の入力は主翼のシートと全く同じなので,次の記事(≫QX-20設計資料⑤:主翼詳細設計)を参考にしてほしい
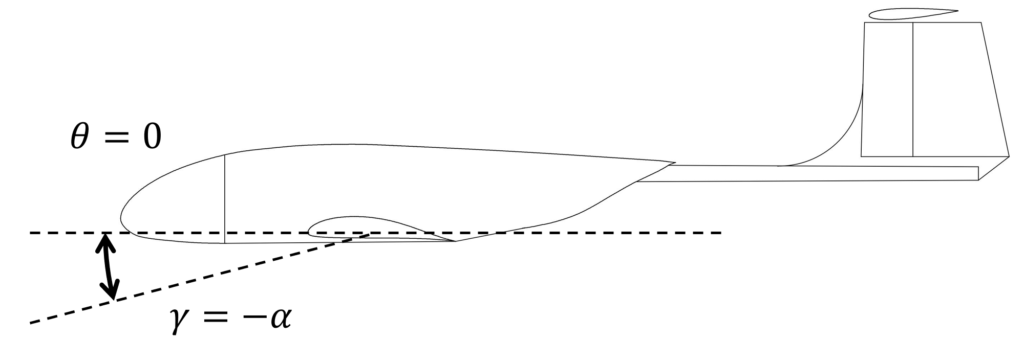
全機計算に入る前に,重要なことを定義しておく
定常滑空時はピッチ角\({\bf \theta=0 [deg]}\),全機迎角\({\bf \alpha=-\gamma}\)である
胴体桁はフライト中つねに地面と平行になる
次の記事(≫全機の計算)を参考に,セルN4にテールモーメントアーム\(l_{t}\),セルN9に水平尾翼取り付け角\(i_{w}\),セルN19に尾翼形式(Conventional or T-tail),セルX23:X32に解析条件を入力する
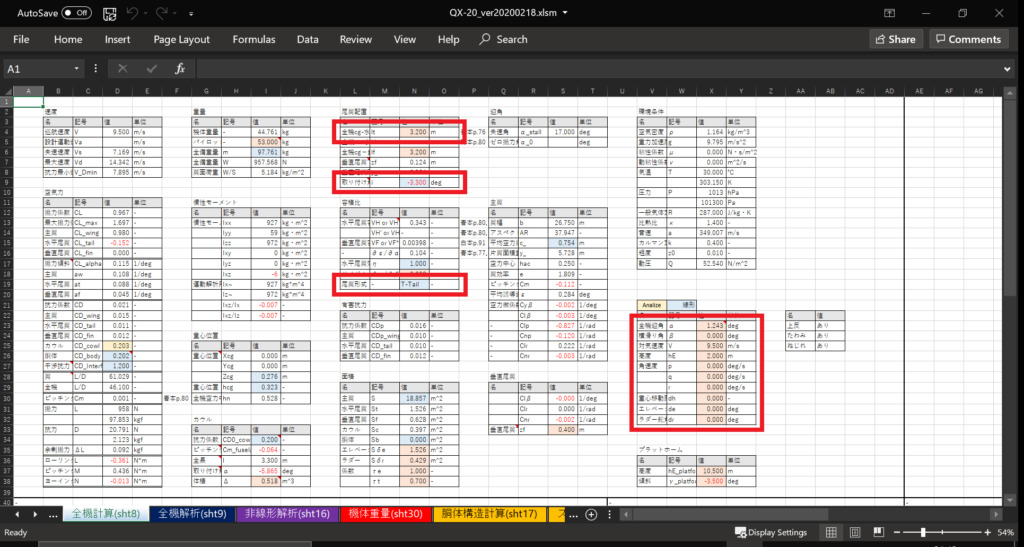
セルW21で線形,非線形を選択し,「全機計算」のマクロを実行する
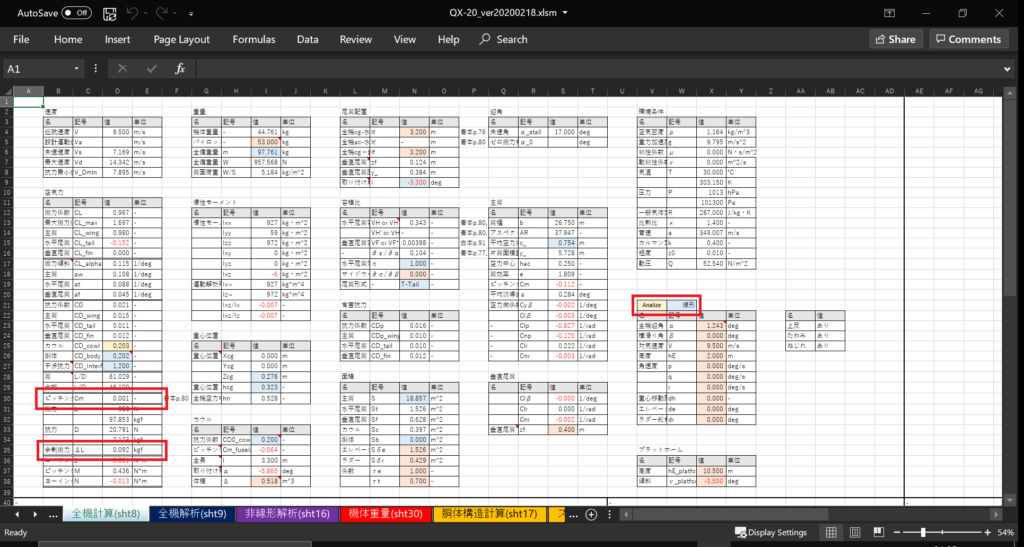
ピッチングモーメント係数\(C_{m}\)はセルD30で確認できるので,\(C_{m}=0\)になるよう水平尾翼取り付け角\(i_{w}\)を調整する
余剰揚力\(\Delta L\)がセルD35で確認できるので,揚力が足りない場合には主翼の詳細設計をやり直す(≫QX-20設計資料⑤:主翼詳細設計)
縦の静安定を表す\(C_{m_{\alpha}}\)はセルX58で確認できる
参考までに,九大の縦の静安定は例年\(C_{m_{\alpha}}=-0.020 [1/deg]=-1.15 [1/rad]\)程度である
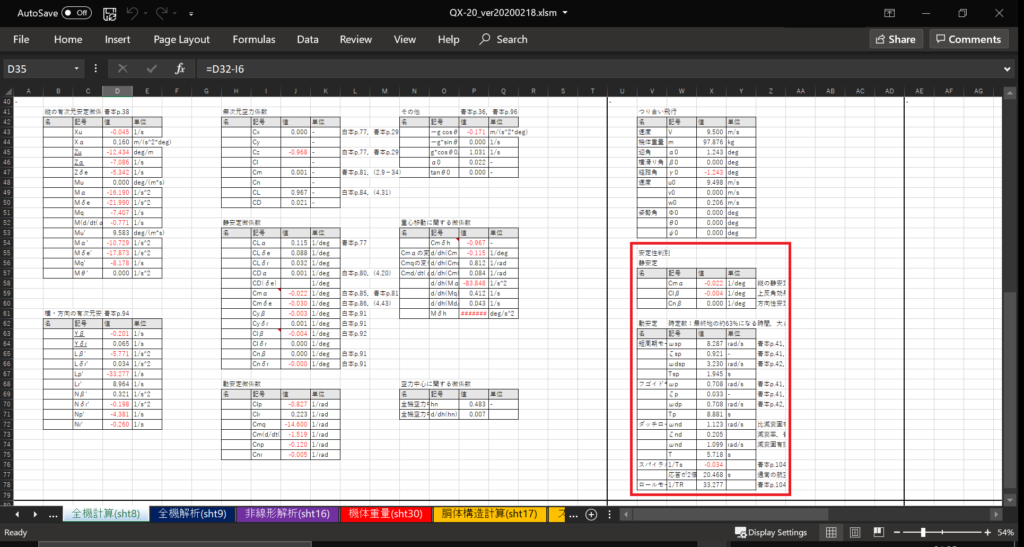
最終的に,QX-20では水平尾翼取り付け角\(i_{w}=-3.3 [deg]\),\(C_{m_{\alpha}}=-0.022 [1/deg]\)となった.(水平尾翼取り付け角は機体軸基準頭上げ正)
ちなみにT字尾翼なので\(\varepsilon=0\),\(\partial \varepsilon/\partial \alpha=0\)として計算している
垂直尾翼
次に垂直尾翼の設計を行う
垂直尾翼設計について,鳥コン出場者ガイドブックでは次のように述べている
機体の形
鳥人間コンテスト出場者ガイドブックp.11より引用
機体を横から見た形ですがこれは重要です.なぜならば飛ぶ前に記念写真を撮る場合,形がいいほうが後になって記念に残ります.垂直尾翼の形は特に重要で,設計者のセンスが出ます.
筆者は鳥コンガイドブックのこの一節が大好きである
また,Aircraft Design: A Systems Engineering Approachには次のように書いてある
The design of the vertical is one of the difficult tasks for aircraft designers, since theoretical and experimental results may not match concerning the features of the vertical tail.
Aircraft Design: A Systems Engineering Approachより引用
そういうことである
紙飛行機を飛ばせばわかるが,垂直尾翼は無くてもまっすぐ飛ぶ
ただし,旋回して飛行経路を変えるためにはラダーが必要である
また,QX-20ではT字尾翼を採用したため,垂直尾翼には水平尾翼を支えるのに十分な新たな構造が必要になる
上記のことを踏まえ,QX-20の垂直尾翼は構造・製作性を第一に,操縦性を第二に設計を行った
垂直尾翼の設計手順は次のようになる
- 舵面サイズの決定
- 垂直尾翼容積比\(V_{F}\)の決定
- モーメントアーム\(l_{f}\)の決定
- 垂直尾翼面積\(S_{f}\)の決定
- 翼型の決定
- アスペクト比とテーパー比の決定
- (全機計算)
- 安定性,操縦性が要求を満たしているかの確認
- 1~8を無限に繰り返す
通常の航空機の設計では舵面サイズの決定はもっと後の行程になるが,鳥コン滑空機に搭載しているのは垂直尾翼ではなくラダーなので,まず第一に舵面サイズの決定から行う
参考までにQX-13∼QX-20の垂直尾翼の諸元を示す
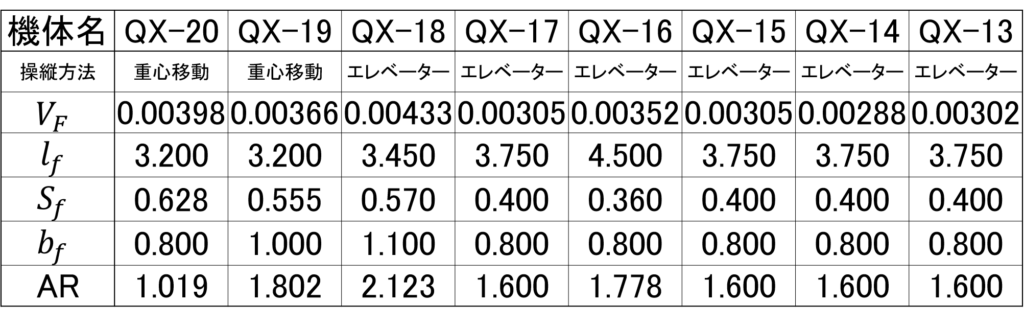
それぞれ説明していく
舵面サイズの決定
まず最初に,舵面サイズを決定する
ラダーの効きを表す空力微係数\(C_{n_{\delta r}}\)は次の式で表される
\begin{eqnarray}
C_{n_{\delta r}}=-V_{F}a_{f}\tau
\end{eqnarray}
ここで,\(a_{f}\)は垂直尾翼の揚力傾斜,\(\tau=\partial \alpha/\partial \delta r\)は舵面の効率を表す係数である
\(C_{n_{\delta r}}\)の導出を以下に示す
\begin{eqnarray}
C_{L_{f}} &=& a_{f}\alpha=a_{f}\frac{\partial \alpha}{\partial \delta r}\delta r = a_{f} \tau \delta r \\
C_{n} &=& -V_{F} C_{L_{f}} =-V_{f}a_{f} \tau \delta r \\
\frac{\partial}{\partial \delta r}C_{n} &=& -V_{f}a_{f}\tau \\
\end{eqnarray}
このように,\(\tau\)は「舵面を1度動かすと,迎角が何度変化したことになるのか」を表しており,オールフライングでは\(\tau=1.0\)である
\(\tau\)は下の表から得られる
QX-20では,\({\bf \tau=0.7}\)になるように舵面サイズを決定した.(何パターンか図面を書いてみて一番しっくり来た)
垂直尾翼容積比\(V_{F}\)の決定
九大はQX-14からラダーを搭載してきたが,長年ラダーが効いているのかどうかよくわからなかった.しかし,QX-19で初めて,フライトを終えたパイロットから「ラダーが効いた」との報告が得られた
\(C_{n_{\delta r}}=-V_{F}a_{f}\tau\)の式と,先ほど決定した\(\tau=0.7\)より,QX-20ではQX-19の垂直尾翼容積比を1/0.7=1.43倍すればQX-19と同じラダーの効きが得られることになる
最終的にQX-20でも,垂直尾翼容積比\({\bf V_{F}=0.00398}\)とした.(今後取り付け予定のドーサルフィンや垂直尾翼のフィレットの面積は含まれていない)
モーメントアーム\(l_{f}\)の決定
QX-20では,モーメントアーム\(l_{f}=3.2 [m]\)とした
T字尾翼なので当然水平尾翼のモーメントアームと同じになる
また,垂直尾翼と水平尾翼を同じ位置に配置することによって水平尾翼が垂直尾翼の翼端版の役割を果たし,垂直尾翼の抗力を抑えることができる
通常配置の尾翼を採用したQX-19では,この効果を狙って水平尾翼と垂直尾翼を同じ位置に取り付けた
垂直尾翼面積\(S_{f}\)の決定
QX-20では,垂直尾翼面積\(S_{f}=0.628 [m^{2}]\)とした
翼型の決定
QX-20では,例年通り垂直尾翼にはNACA0009を採用した
アスペクト比とテーパー比の決定
T字尾翼の垂直安定板はCFRPのモノコック構造を用いる
現在九大が購入しているプリプレグの幅が1.0mなので,スパン方向にプリプレグを継ぎ足さないなら垂直尾翼のスパンは1.0mが限界である
また,発泡マンドレルを抜くための弓熱線は500㎜までの発泡ブロックしか切ることができないため,マンドレルの長さは1.0mかもしくは1.5mである
QX-20では発泡マンドレルの長さを1.0mとし,最初0.95mで安定板を焼き上げ,両端を計50㎜切り落とし,スパン0.9mで試作機に取付を行った
その際,満場一致で「なんか長くね?」となったためさらに0.1m切り落とし,最終的に垂直尾翼のスパンは0.8mとした
テーパー比は,垂直安定板のせん断中心が一直線になるように決定した
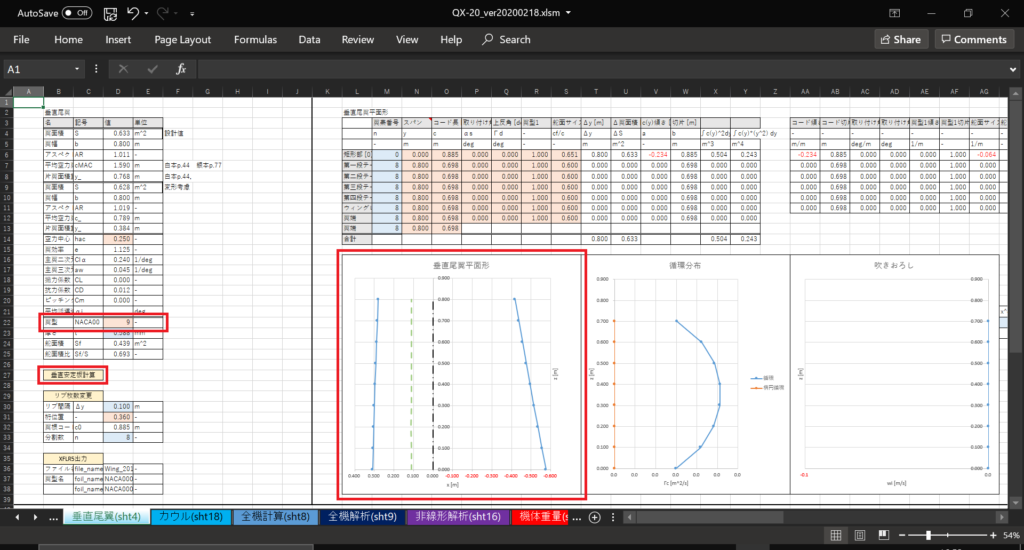
設計シートの使い方
平面形の入力は主翼のシートと全く同じなので,次の記事(≫QX-20設計資料⑤:主翼詳細設計)を参考にしてほしい
垂直尾翼のシートでは,S6:S11に舵面サイズcf/c(コード長に対する舵面部分のコード長の比)を入力するとセルD25で舵面積比Sf/Sを計算してくれる
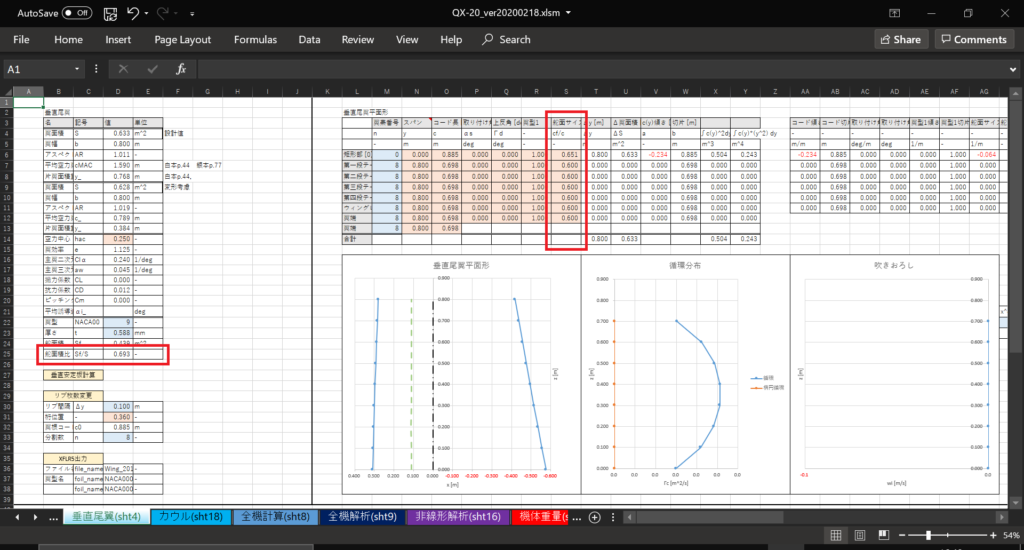
セルD22にNACA00○○の下2桁を入力し,「垂直尾翼舵面計算」のマクロを実行すれば,右側のグラフにせん断中心が緑色の破線で表示される
安定性,操縦性が要求を満たしているかの確認
全機計算を行って,安定性,操縦性を確認する
操縦性のほうはQX-19の操縦性を満たすように設計したため確認は省略する
航空機の飛行力学と制御p.104をもとに計算したダッチロールモードとスパイラルモードの近似解を以下に示す
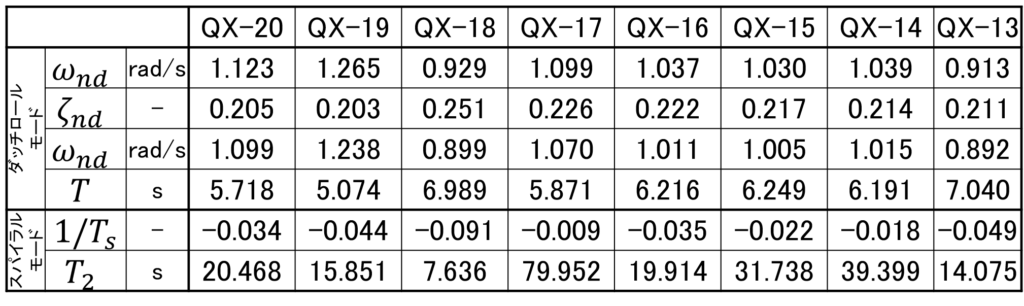
確かにQX-19がダッチロールモードの周期が最も短く,ダッチロールに陥りやすくなっている
上反角もりもりのQX-19よりQX-20のほうがスパイラルモードが安定側に近い理由は,主翼の揚力を翼根側に寄せたことで\(C_{l_{r}}\)や\(C_{n_{p}}\)が小さくなったためである
スパイラル安定に寄与するのは\(C_{l_{\beta}}\)だけではない
構造
最後に,QX-20で初めて採用した垂直尾翼の構造について説明する
垂直安定板はカーボンモノコック構造とし,11月17日に行われた尾翼試験で使用したものを本番機でも使用することによって作業工程を削減した

積層構成は,翼型部分は(90/0/)sの4層,重なりしろをウェブに持ってくることでウェブの部分は(90/90/0/0)sの8層になっている

垂直安定板と胴体の接合は,前縁側1か所,後縁側2か所の計3か所で行う
使用する金具は次の2つ
19F-3のほうをボルトとメタルロックを使って垂直安定板に固定した

胴体側に19A46-3をカーボンクロスを使って取り付けた.(積層数2層)

垂直安定板の上下端に厚さ10㎜のバルサのリブを入れた
水平尾翼マウントはバルサリブを通してボルトで固定し,水平尾翼の荷重はバルサリブを通してウェブに伝える
舵面は発泡ブロックから切り出し,後縁をカーボンで補強,肉抜きを行ったあとプランクを貼る

舵面と安定板の接合は上下2か所のリベットピンで行う
尾翼試験時の重量は垂直安定板800g,舵面320gとなった
尾翼試験では最大対気速度17.8m/sでも壊れず正常に動作してくれた
まとめ
QX-20で構造的にいろいろと変わった尾翼まわりだが,空力設計的にはほとんどQX-19と変わってない
↓QX-20設計資料まとめ
コメント