igc形式のフライトログにフーリエ変換でローパスフィルターをかけてノイズを除去するPythonプログラムについて説明する
はじめに
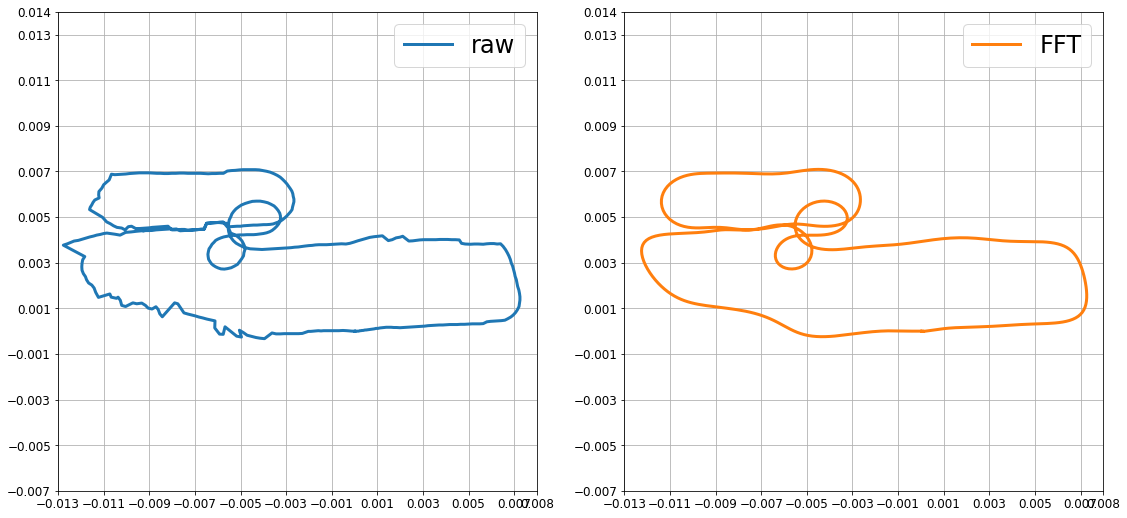
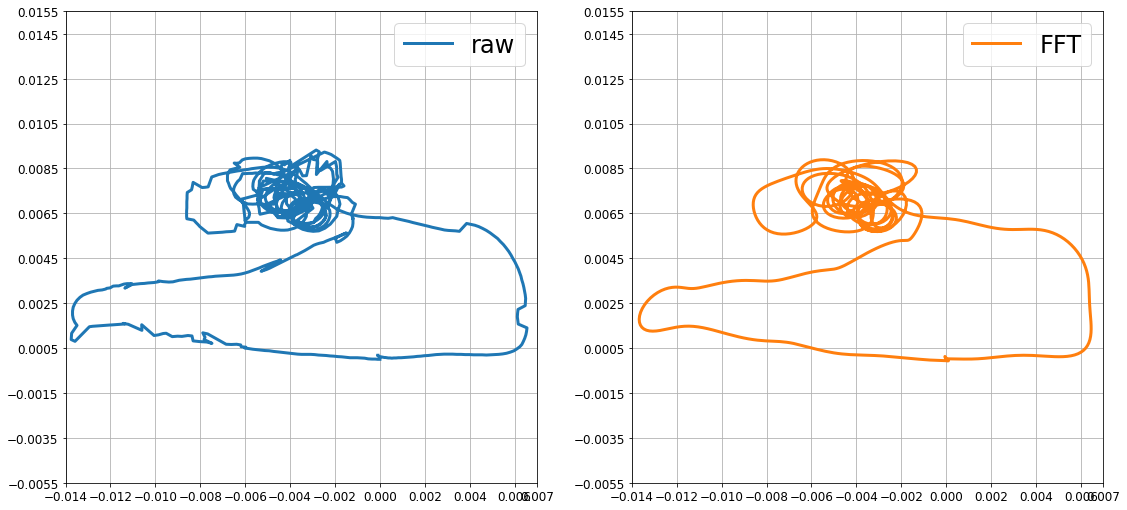
最終的にはこんな感じでノイズが取り除かれた.igcファイルを作成する
(左:元データ,右:ノイズ除去後)
↓.igcファイルの概要と読み取り方についてはこちら

それではいってみよう
ローパスフィルタ
GPSでフライトログを取得すると,下図のようなガタガタの飛行軌跡が得られるが,これはグライダーのフライトの滑らかな軌跡にGPSの誤差などの細かなノイズが加わっているためである
グライダーのフライトの時間スケールが数十秒(サーマル旋回)から数時間(フライト全体)なのに対してGPSのノイズの時間スケールが数秒(データの取得間隔の数倍)であることを考えると、得られたデータ信号の時間スケール(周期)に注目すれば真のデータとノイズとを分離できそうである
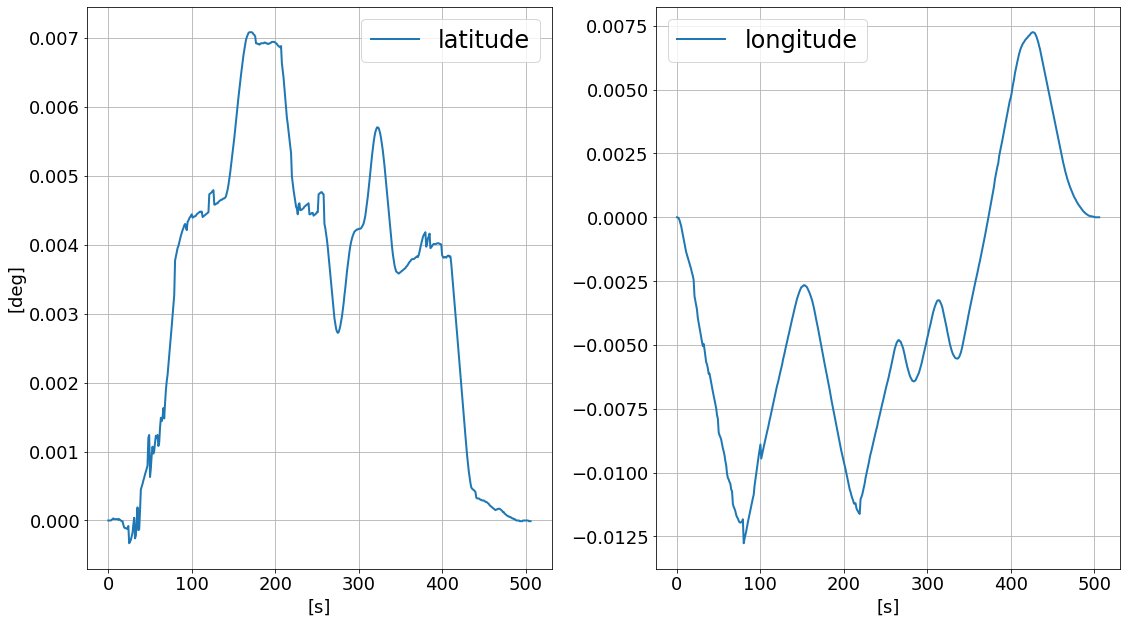
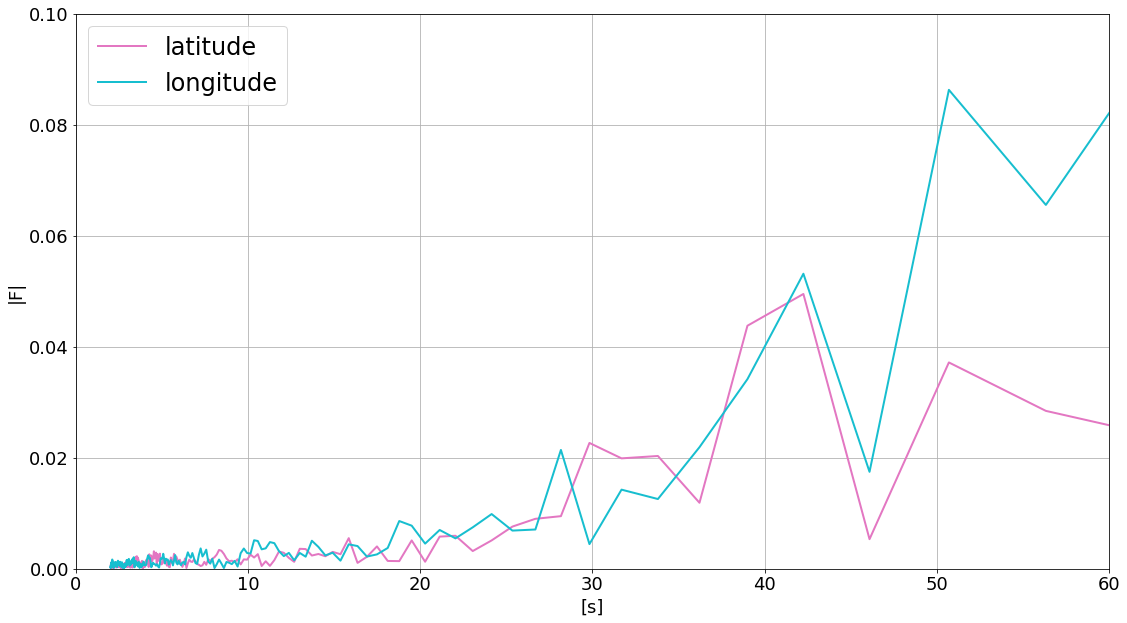
実際、上の画像のrawデータを以下のフーリエ変換によって周波数解析すると下図のようになる
\begin{equation}
F(\omega)=\int_{-\infty}^{\infty}{f(t)e^{-i \omega t}}dt
\end{equation}
\begin{equation}
T=\frac{1}{\omega}
\end{equation}
周期が数十秒以上の信号だけでなく,周期が数秒のノイズと思われる信号も混ざっていることが分かる
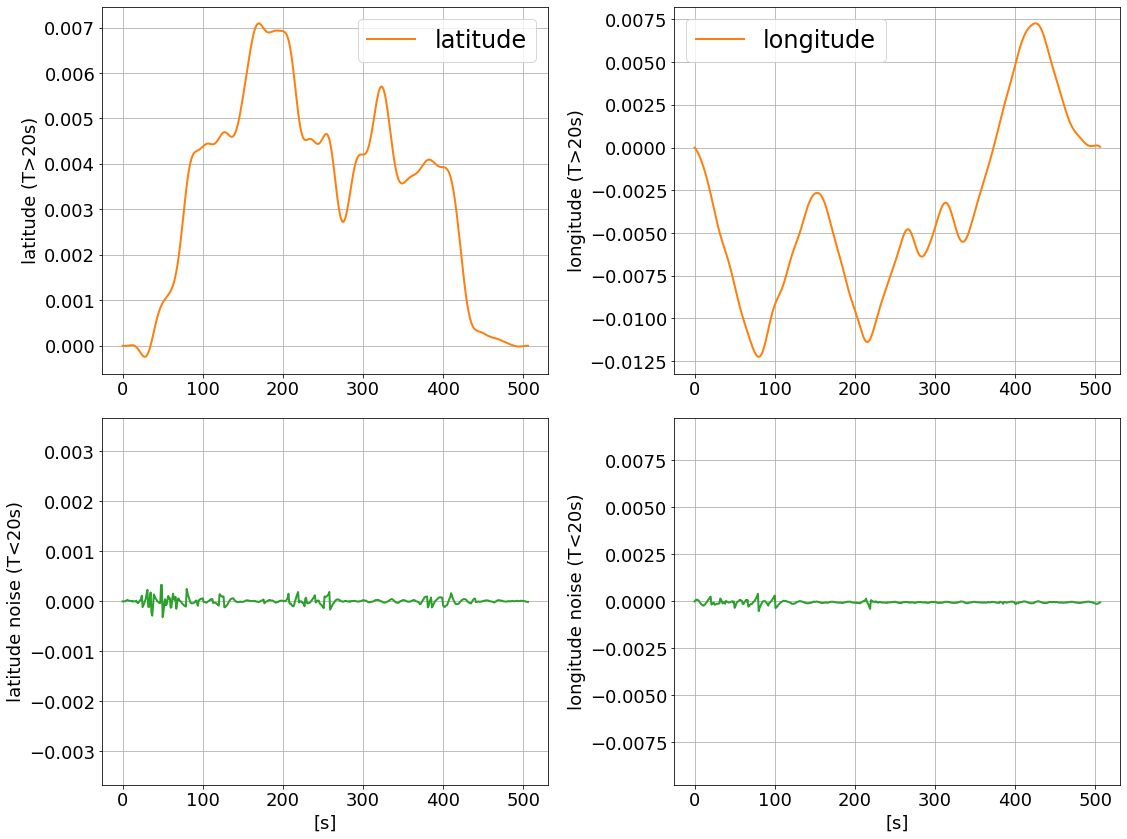
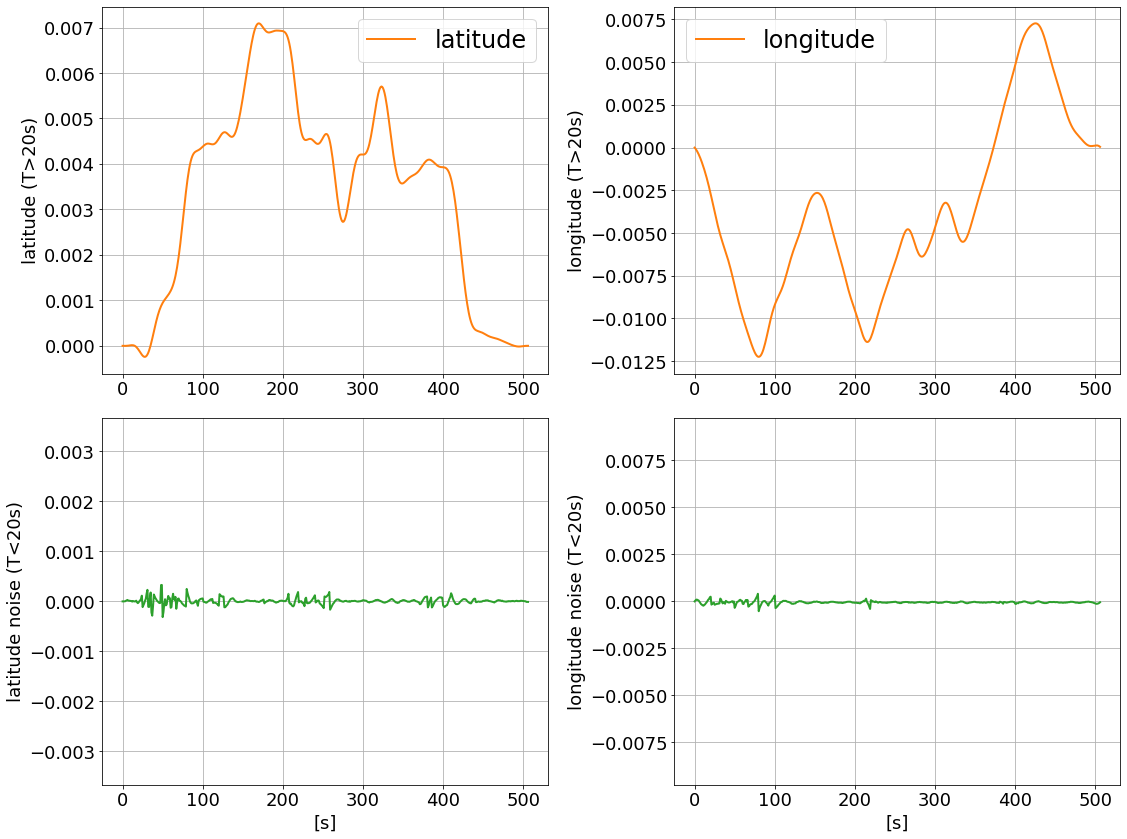
この信号に対して,以下のように周期が20秒以下のものを取り除き,逆フーリエ変換をかけると下図のようになる
\begin{equation}
F'(\omega)=\left\{\begin{array}{ll}
0&\left(T < 20\right)\\
F(\omega)&\left(T \geq 20\right) \\
\end{array}\right.
\end{equation}
\begin{equation}
f'(t)=\frac{1}{2\pi}\int_{-\infty}^{\infty}{F'(\omega)e^{i \omega t}}d\omega
\end{equation}
元データからGPSのノイズらしきものがきれいの取り除かれていることが分かる
このように,ノイズ混じりのデータに対して、周波数の低い真のデータをそのままに、周波数の高いノイズを除去する手法のことをローパスフィルタ(Low Pass Filtering)という
ローパスフィルタの閾値
今回のプログラムのローパスフィルタの閾値を決める際はグライダーのソアリング旋回の周期を参考にした
速度\(V\),バンク角\(\phi\)で定常旋回するグライダーの旋回周期\(T\)は次の式で計算できる
\begin{equation}
T=\frac{2 \pi V}{g \tan{\phi}}
\end{equation}
この式を使うと,速度90km/h(=25.0m/s)の45度旋回の周期は\(16.0\)s,速度80km/h(=22.2m/s)の30度旋回の周期は\(24.7\)sということがわかる
\begin{align}
&T=\frac{2 \pi \times 25.0}{9.8 \tan{45^\circ}} \simeq 16.0\\\\
&T=\frac{2 \pi \times 22.2}{9.8 \tan{30^\circ}} \simeq 24.7\\
\end{align}
以上より,ローパスフィルタの閾値を周期20秒とすれば概ねグライダーの飛行軌跡を取り出すことができると思われる
ソースコード全文
ソースコード全文はこれ
import datetime
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# Import IGC file from current directory
path = '2023-02-22-XNA-9AD179D6D6F04DDD95474658245E6D4F-01.igc'
with open(path) as f:
igcfile = f.readlines()
# Extract B-record from IGC file
date = datetime.date(int(path.split('-')[0]),int(path.split('-')[1]),int(path.split('-')[2]))
igcfile = [line.rstrip("\n") for line in igcfile]
igc_B = [[igcfile.index(lines),lines] for lines in igcfile if 'B' in lines[0] if 'A' in lines]
list_B = [[lines[0],lines[1][0],lines[1][1:7],lines[1][7:14],lines[1][14],lines[1][15:23],lines[1][23],lines[1][24],lines[1][25:30],lines[1][30:]] for lines in igc_B]
# Convert text of B-record to values
idx=0
for _ in list_B:
list_B[idx][2] = datetime.datetime(date.year,date.month,date.day,int(list_B[idx][2][:2]),int(list_B[idx][2][2:4]),int(list_B[idx][2][4:]))
list_B[idx][3] = float(list_B[idx][3])/100000.
list_B[idx][5] = float(list_B[idx][5])/100000.
list_B[idx][8] = float(list_B[idx][8])
list_B[idx][9] = float(list_B[idx][9])
idx+=1
# Create dataframe from list of records and export it as CSV file
df_B = pd.DataFrame(list_B,columns=['igc_index', 'record_type', 'UTC_time','latitude','NS','longitude','EW','fix_validity','press_alt','GNSS_alt'])
df_B.to_csv(path[:-4]+".csv")
# Low pass filtering by using FFT
df_B0 = df_B.copy()
for column in ['latitude','longitude','press_alt','GNSS_alt']:
f = df_B[column].values
F = np.fft.rfft(f)
freq = np.fft.rfftfreq(len(f))
F[(1/(freq+1e-10) < 20)] = 0
df_B[column] = np.fft.irfft(F, len(f))
# Convert dataframe to list in same format as IGC
list_B_out = [[lines[0],lines[1]+lines[2].strftime('%H%M%S')+format(int(lines[3]*100000),'07')+lines[4]+format(int(lines[5]*100000),'08')+lines[6]+lines[7]+format(int(lines[8]),'05')+format(int(lines[9]),'05')] for lines in df_B.values.tolist()]
igcfile_out = igcfile
idx_df=0
for idx in np.arange(len(igcfile_out)):
if idx <= df_B.igc_index.max() and df_B.values.tolist()[idx_df][0] == idx:
line_B = df_B.values.tolist()[idx_df]
igcfile_out[idx] = line_B[1]+line_B[2].strftime('%H%M%S')+format(int(line_B[3]*100000),'07')+line_B[4]+format(int(line_B[5]*100000),'08')+line_B[6]+line_B[7]+format(int(line_B[8]),'05')+format(int(line_B[9]),'05')
idx_df+=1
# Save created list as new igc file
path_w = path[:-4]+"FFT"+path[-4:]
with open(path_w, mode='w') as f:
f.write('\n'.join(igcfile_out))
# Plot 3D flight path
fig = plt.figure(figsize=(16,9))
ax = fig.add_subplot(projection='3d')
x = np.radians(df_B.longitude-df_B.longitude[0])*6378.137*1000
y = np.radians(df_B.latitude-df_B.latitude[0])*6378.137*1000
z = df_B.press_alt-df_B.press_alt.min()
range = max(abs(x.min()),abs(x.max()),abs(y.min()),abs(y.max()),abs(z.min()),abs(z.max()))
ax.view_init(elev=30, azim=-60)
ax.set_xlim3d(-range,range)
ax.set_ylim3d(-range,range)
ax.set_zlim3d(0,range)
ax.set_box_aspect((2,2,1))
ax.plot(x,y,z,c="red")
plt.show()
↓Git hub
≫https://github.com/mtkbirdman/mtkbirdman.com/tree/master/igc
↓Google colaboratoryの人はこっち

.igcファイルの読み込みについては前回の記事(https://mtkbirdman.com/python-convert-igc-file-to-csv-data)で説明したので,それ以降のプログラムを解説する
プログラムの解説
# Perform Low pass filter by using FFT
df_B0 = df_B.copy().copy()でオリジナルのデータフレームをコピーしておく
データフレームは普通に=で複製すると参照渡し,.copy()で複製すると値渡しになる
≫pandas.DataFrame.copy — pandas 1.5.3 documentation
for column in ['latitude','longitude','press_alt','GNSS_alt']:
f = df_B[column].values
F = np.fft.rfft(f)
freq = np.fft.rfftfreq(len(f))
F[(1/(freq+1e-10) < 20)] = 0
df_B[column] = np.fft.irfft(F, len(f))ここでフーリエ変換を行っている
df.valuesでフーリエ変換したい値\(f\)をnp.ndarrayに変換する
np.fft.rfft(x)でフーリエ変換を行い,np.fft.rfftfreq(len(x))でフーリエ変換\(F\)のサンプル周波数\(\omega\) [Hz]を取得する
\begin{equation}
F(\omega)=\int_{-\infty}^{\infty}{f(t)e^{-i \omega t}}dt
\end{equation}
F[(1/(freq+1e-10) < 20)] = 0で周期\(T=1/\omega\) [s]が20より小さい信号の強度をゼロにする(ローパスフィルター)
最後にnp.fft.irfft(F, len(f))で\(F\)のフーリエ逆変換を行う
\begin{equation}
f(t)=\frac{1}{2\pi}\int_{-\infty}^{\infty}{F(\omega)e^{i \omega t}}d\omega
\end{equation}
≫https://pandas.pydata.org/docs/reference/api/pandas.DataFrame.values.html
≫https://numpy.org/doc/stable/reference/generated/numpy.fft.rfft.html
# Convert dataframe to list in same format as IGC
list_B_out = [[lines[0],lines[1]+lines[2].strftime('%H%M%S')+format(int(lines[3]*100000),'07')+lines[4]+format(int(lines[5]*100000),'08')+lines[6]+lines[7]+format(int(lines[8]),'05')+format(int(lines[9]),'05')] for lines in df_B.values.tolist()]df_B.values.tolist()でデータフレームをリストに変換し,各数値をB recordのテキストに変換・結合する
igcfile_out = igcfile
idx_df=0
for idx in np.arange(len(igcfile_out)):
if idx <= df_B.igc_index.max() and df_B.values.tolist()[idx_df][0] == idx:
line_B = df_B.values.tolist()[idx_df]
igcfile_out[idx] = line_B[1]+line_B[2].strftime('%H%M%S')+format(int(line_B[3]*100000),'07')+line_B[4]+format(int(line_B[5]*100000),'08')+line_B[6]+line_B[7]+format(int(line_B[8]),'05')+format(int(line_B[9]),'05')
idx_df+=1前回の記事で用意しておいた変数igc_index(抽出したB recordの元ファイルでのインデックス)を頼りにフーリエ変換後のB recordを.igcファイルのリストに戻していく
# Save created list as new igc file
path_w = path[:-4]+"FFT"+path[-4:]
with open(path_w, mode='w') as f:
f.write('\n'.join(igcfile_out))読み込んだファイル名の末尾に「FFT」を付け加え,.igcファイルを出力する
実行例
以下のコマンドでigcfile.pyを実行する
python igcfile.pyigcfile.pyと同じディレクトリに*FFT.igcと*.csvが作成される
/mnt/c/Users/mtkbirdman/Desktop/igc
├── 2023-02-22-XNA-9AD179D6D6F04DDD95474658245E6D4F-01.csv
├── 2023-02-22-XNA-9AD179D6D6F04DDD95474658245E6D4F-01.igc
├── 2023-02-22-XNA-9AD179D6D6F04DDD95474658245E6D4F-01FFT.igc
└── igcfile.pyサーマルでぐるぐる回りまくっても大丈夫である
おわりに
igc形式のフライトログにフーリエ変換でローパスフィルターをかけてノイズを除去するPythonプログラムについて説明した
↓フライトログ記録アプリ

↓関連記事


コメント