
ヘリコプターの力のつり合い,操縦,安定性についての概要を説明する
はじめに
ヘリコプターの飛行力学入門シリーズでは,ヘリコプターを初めて学ぶところから,フライトシミュレーターの作成やヘリコプターの基本設計を行うところまでに必要な知識について説明していく
↓今回の記事の参考文献
↓前回の記事
今回の記事では,ヘリコプターの力のつり合い,操縦,安定性についての概要を説明する
- ヘリコプターにはたらく3つの力と2つのつり合い状態
- 機体座標軸の定義
- ヘリコプターの操縦方法
- ヘリコプターの安定性
いきなりヘリコプターの話を始めても混乱するので,慣れ親しんだ固定翼機と比較しながら説明していく
それではいってみよう
力のつり合い/トリム
ヘリコプターや固定翼機が空を飛ぶためには,機体にはたらく重力と空気抵抗につりあうだけの力が必要になる
機体にはたらく力がつりあっており,機体にはたらくモーメントがゼロになっている状態をトリムという
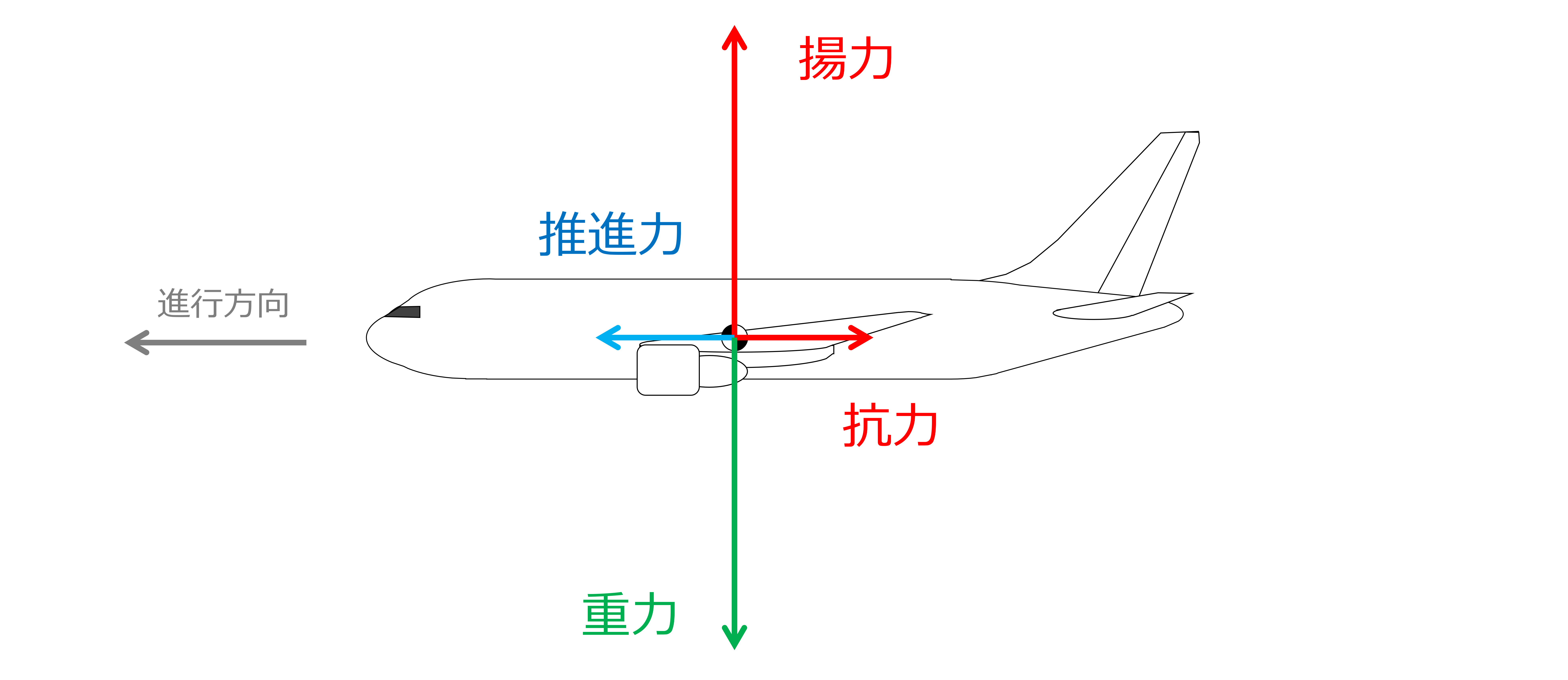
固定翼機がトリム飛行(等速等高度前進飛行)をするためには,以下の4つの力がつりあう必要がある
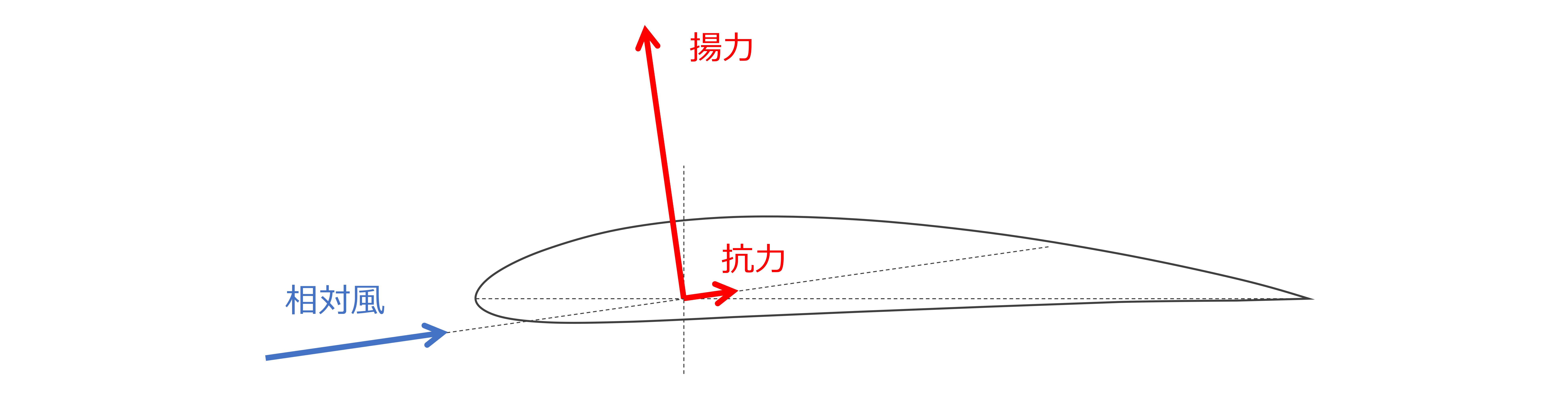
翼が空気の流れの中に置かれると,空気から力を受ける
その流れに対する垂直成分の力が揚力で,水平成分の力が抗力である
飛行機が空中にとどまっておくためには機体にはたらく重力と揚力の大きさが釣り合っている必要があり,同じ速度で飛び続けるためには機体にはたらく抗力と同じ大きさの推進力を生み出す必要がある
このとき,機体にはたらくモーメントの合計はゼロになっており,機体は左右対称のため横方向の力もはたらいていない
- 固定翼機には揚力,抗力,重力,推進力の4つの力がはたらいている
- トリム状態では,揚力と重力,推進力と抗力がそれぞれ同じ大きさ逆向きでつりあっている
- 機体は左右対称で横方向の力は発生していない
ヘリコプターの力のつり合い/トリムは,固定翼機と比較して以下の点が大きく異なる
- はたらく力が3つしかない
- トリム状態が2つある
- 空力的に左右非対称である
ヘリコプターでは,固定翼機における推進力と揚力の役割をメインローターの推力だけで担っているため,機体にはたらく力は推力,抗力,重力の3つになる
また,ヘリコプター特有のホバリング(空中で静止する飛行形態)における特性は前進飛行時と大きく異なるため,トリム状態も2つあると考えた方がいい
それぞれのトリム状態について,3つの力がどのようにつりあっているかを説明する
- ローター推力はローター回転面にほぼ垂直にはたらく
- 3つの力がはたらいている剛体がつりあっているとき,3力の作用線は1点で交わる
≫剛体にはたらく力のつり合い ■わかりやすい高校物理の部屋■
前進飛行
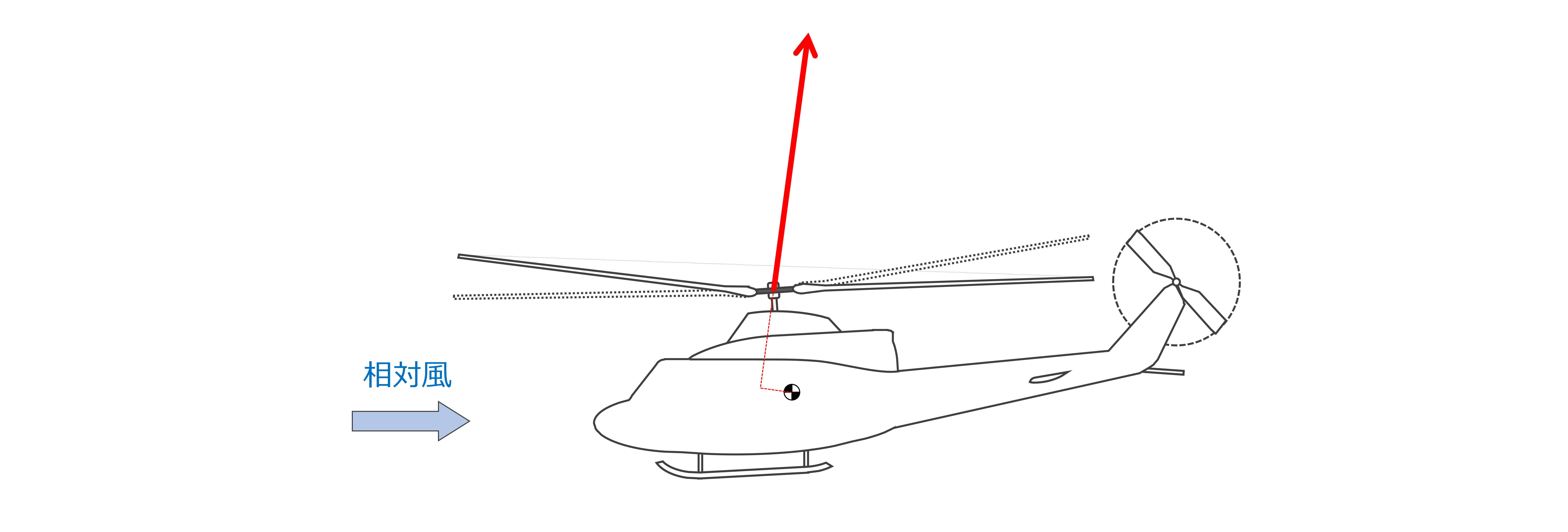
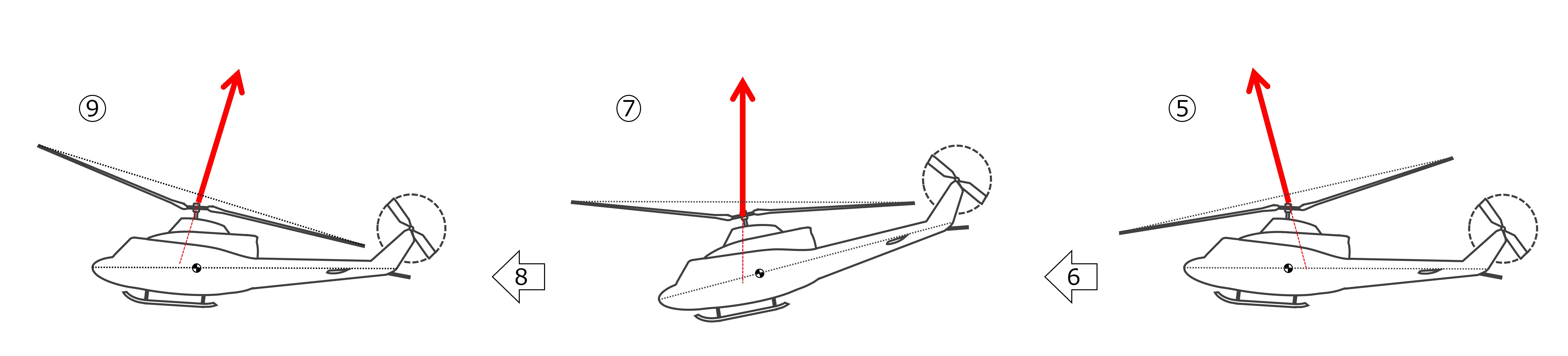
ヘリコプターが前進飛行しているときの力のつり合いは以下のようになる
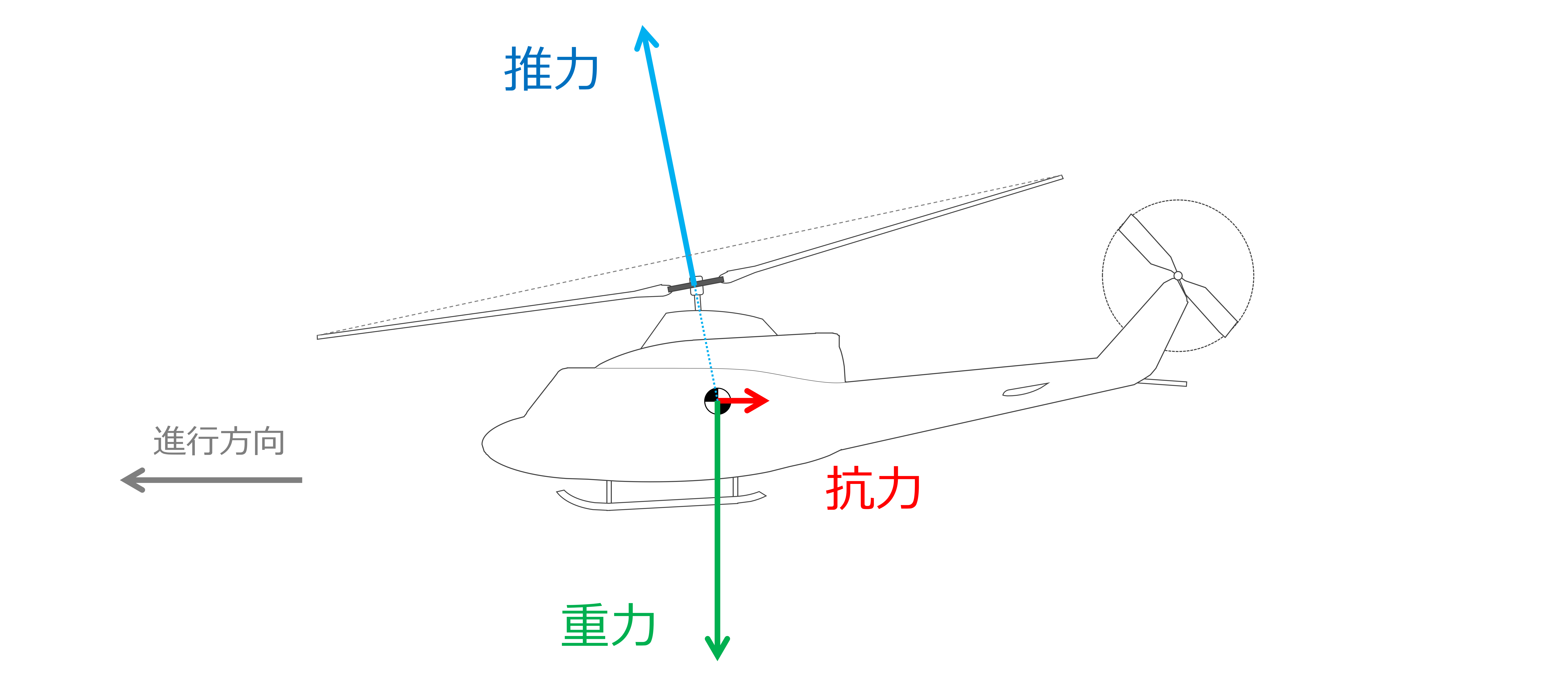
機体には推力,抗力,重力の3つの力がはたらいており,推力の進行方向成分と抗力,推力の鉛直方向成分と重力がそれぞれ同じ大きさ逆向きでつりあっている
メインローター推力がローター回転面に垂直で,かつ推力・抗力・重力の作用線が1つの点で交わっていることに注目してほしい(機体にはたらくモーメントはゼロ)
上の図のように,前進飛行中に胴体を水平に保つために,ヘリコプターではあらかじめメインローターの回転軸を前傾させておく
実際のヘリコプターの前進飛行時は固定翼機と同様に水平安定板が下向きの揚力を発生させているため,重心位置は「メインローターシャフトのわずかに前方」に位置することが多い
ホバリング
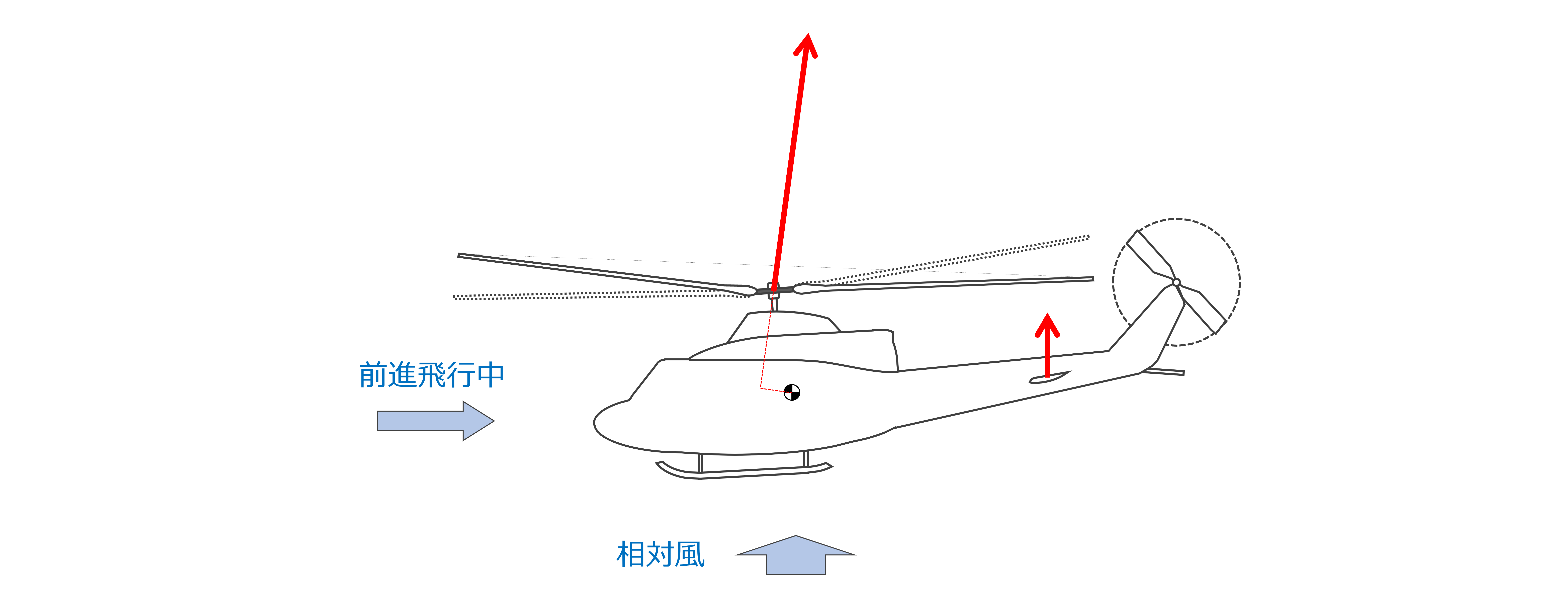
ヘリコプターがホバリングしているときの力のつり合いは以下のようになる
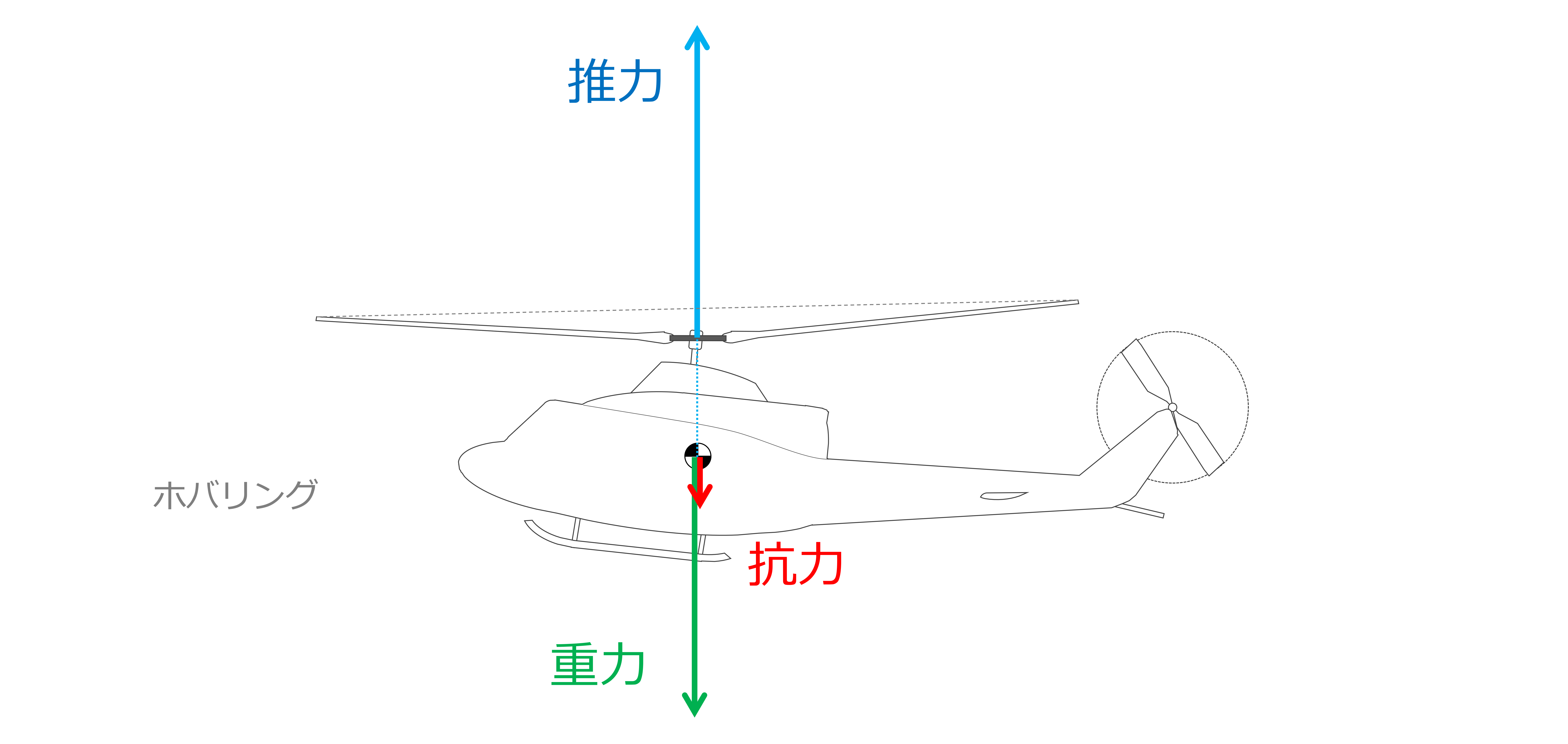
前進飛行時との違いは以下の3点
- 推力が真上にはたらいていること
- メインローターの吹き下ろしによって抗力が真下にはたらいていること
- 胴体が頭上げになっていること
前進飛行時と同様に,「メインローター推力がローター回転面に垂直」で「3つの力の作用線が1点で交わる」ということを考えれば,胴体の姿勢は頭上げで決定する
- ヘリコプターには推力,抗力,重力の3つの力がはたらいている
- 前進飛行とホバリングという性質の異なる2つのトリム形態がある
- 前進飛行時はメインローターを前傾させて胴体を水平に保っている
- ホバリング時は胴体が頭上げになる
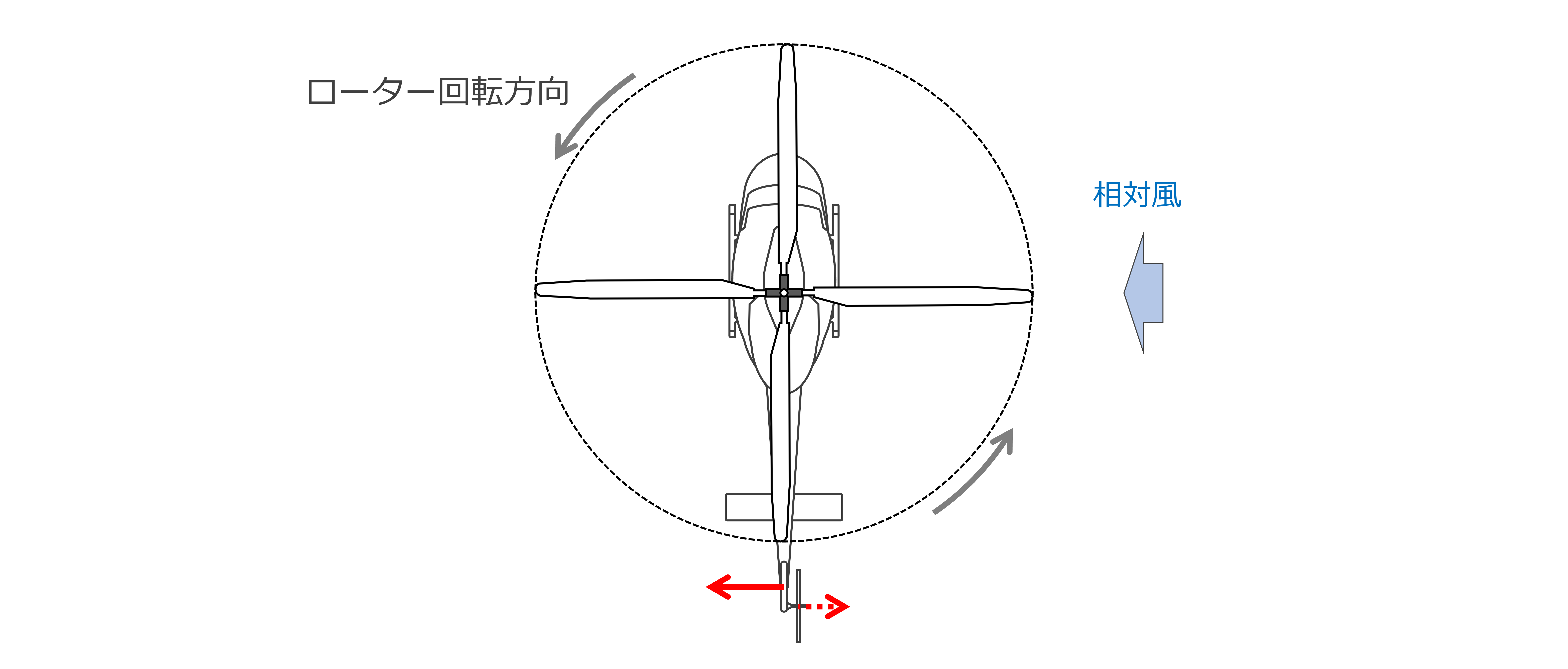
方向のトリム
ヘリコプターのメインローターが回転すると,ローターの回転方向と逆の方向に機体を回そうとする反トルクが発生する
シングルローターのヘリコプターでは,メインローターの反トルクとつりあうようにテールローターの推力を調整し,メインローターの反トルクを相殺している
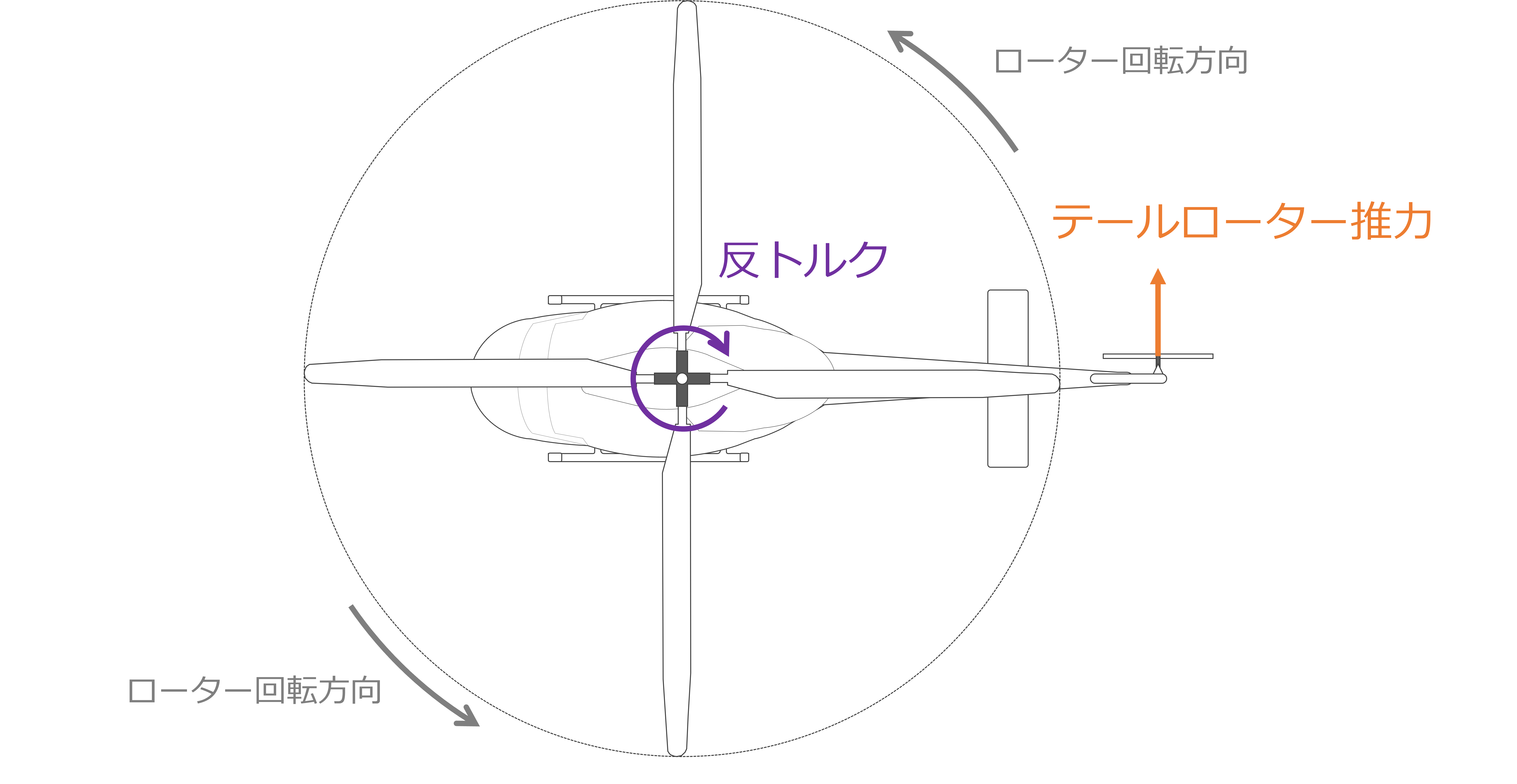
このテールローターの推力によって,ヘリコプターにはたらく力は左右非対称になり,ヘリコプターの飛行力学をより一層難しくしている
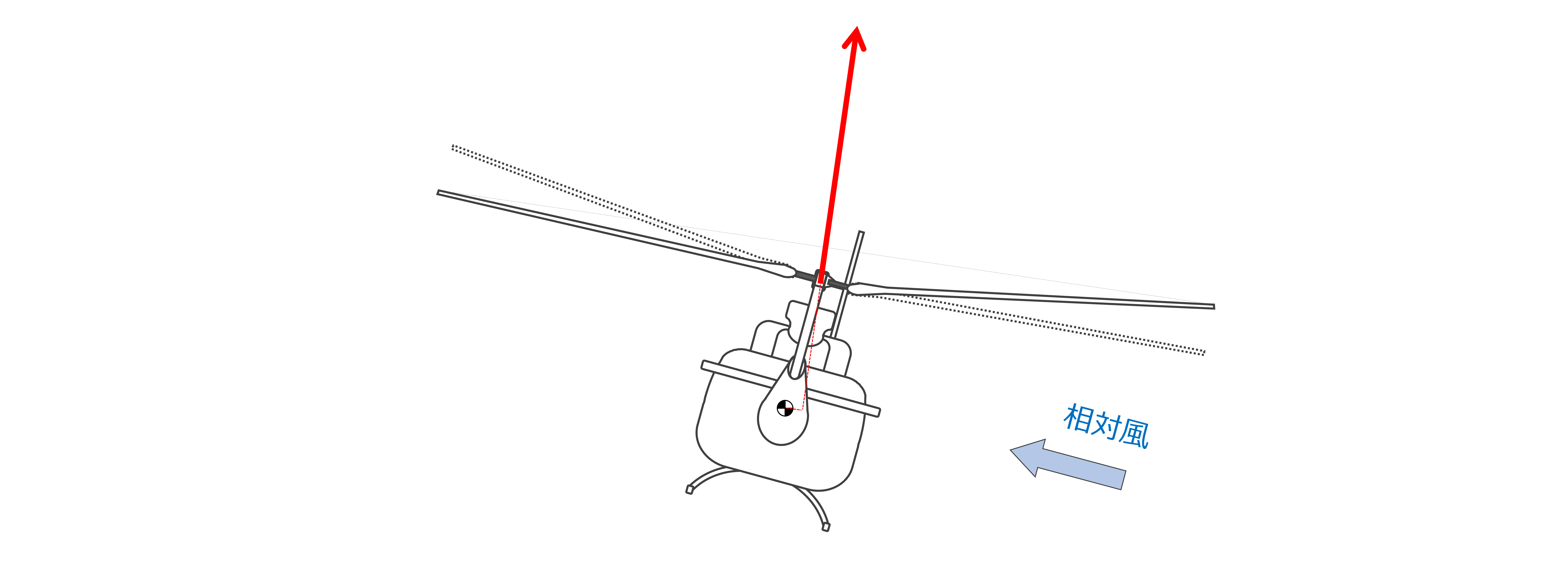
横のトリム
ヘリコプターが前進飛行/ホバリングするためには,テールローター推力とつりあうようにメインローター推力を横に傾ける必要がある
さらに,テールローターの高さによってトリム時の胴体のバンク角が変化する
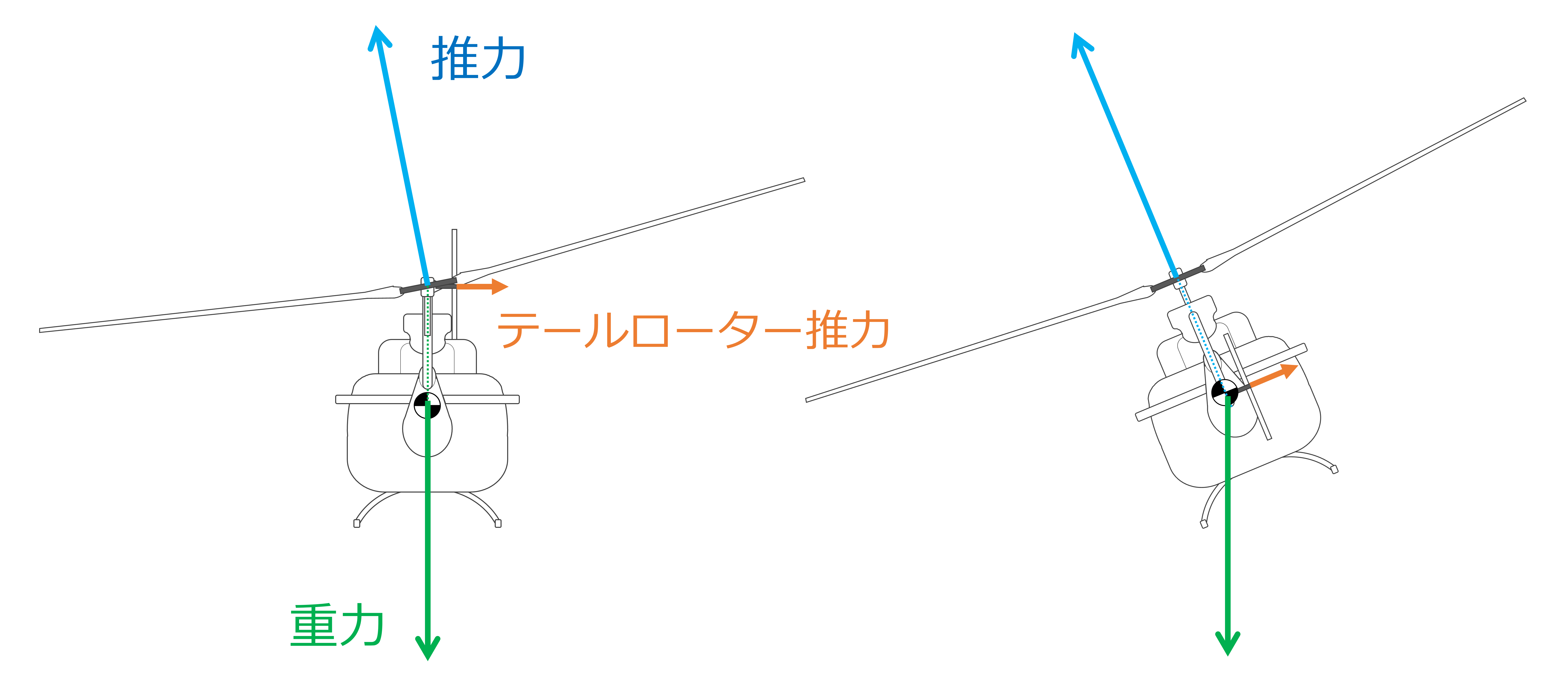
このように,トリム飛行時の胴体の角度(ピッチ/ロール)の計算は一筋縄ではいかない
- テールローター推力でメインローターの反トルクを打ち消す
- メインローター推力を左に傾けてテールローター推力とつりあわせている
- テールローターの高さによってトリム飛行時の胴体のバンク角が決まる
操縦
固定翼機やヘリコプターの操縦についてまとめると以下の表のようになる
| 固定翼機 | ヘリコプター | |
| エネルギー供給 | 出力(エンジン) | コレクティブピッチ角(メインローター) |
| ロール | エルロン舵角(主翼) | 横サイクリックピッチ角(メインローター) |
| ピッチ | エレベーター舵角(水平尾翼) | 縦サイクリックピッチ角(メインローター) |
| ヨー | ラダー舵角(垂直尾翼) | コレクティブピッチ角(テールローター) |
固定翼機はエネルギー供給および3軸回りの姿勢角制御をそれぞれエンジン,主翼,水平尾翼,垂直尾翼で分担して行っているのに対して,ヘリコプターはヨー角の制御以外はすべてメインローターで行っている
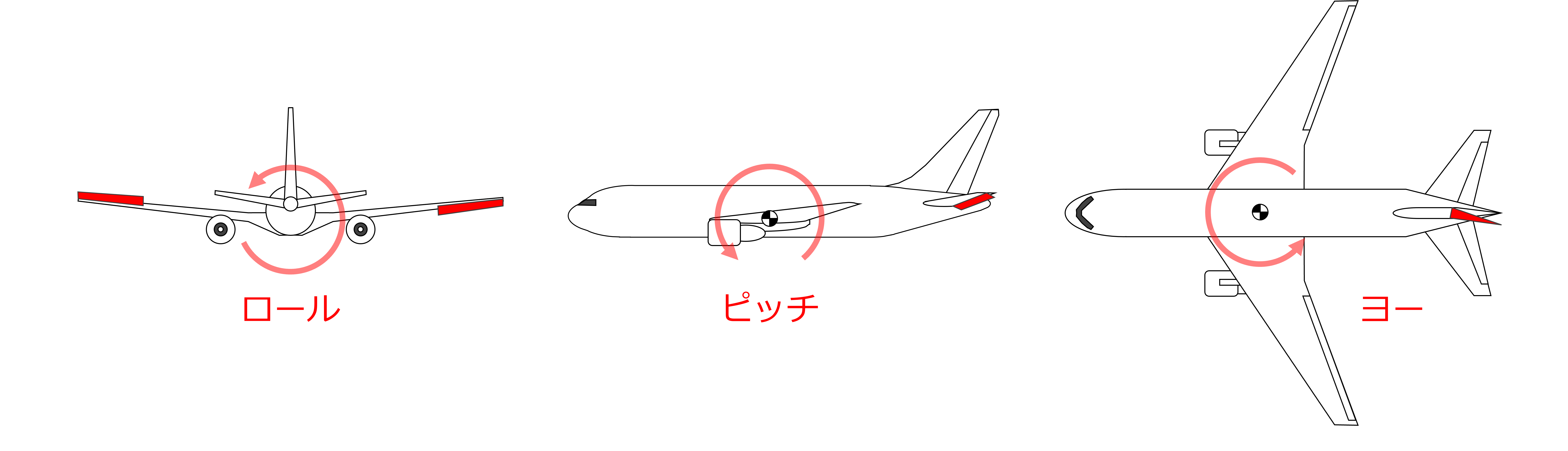
固定翼機はエルロン/エレベーター/ラダーを用いてそれぞれロール/ピッチ/ヨーの制御を行う
それぞれの舵の役割は以下の通り
- エンジン推力で機体にエネルギーを供給する
- エルロンで機体を傾けて旋回する
- エレベーターで機体の速度を設定する
- ラダーで機体が滑らないように調整する
↓ロール/ピッチ/ヨーの姿勢角や座標系についてはここを参照
ヘリコプターの操縦は以下の要領で行われている
- ロール/ピッチの制御はサイクリックスティックでメインローター推力を傾けることにより行う
- ヨーの制御はラダーペダルでテールローター推力の大きさを調整することにより行う
- メインローター推力の大きさはコレクティブピッチレバーで制御する
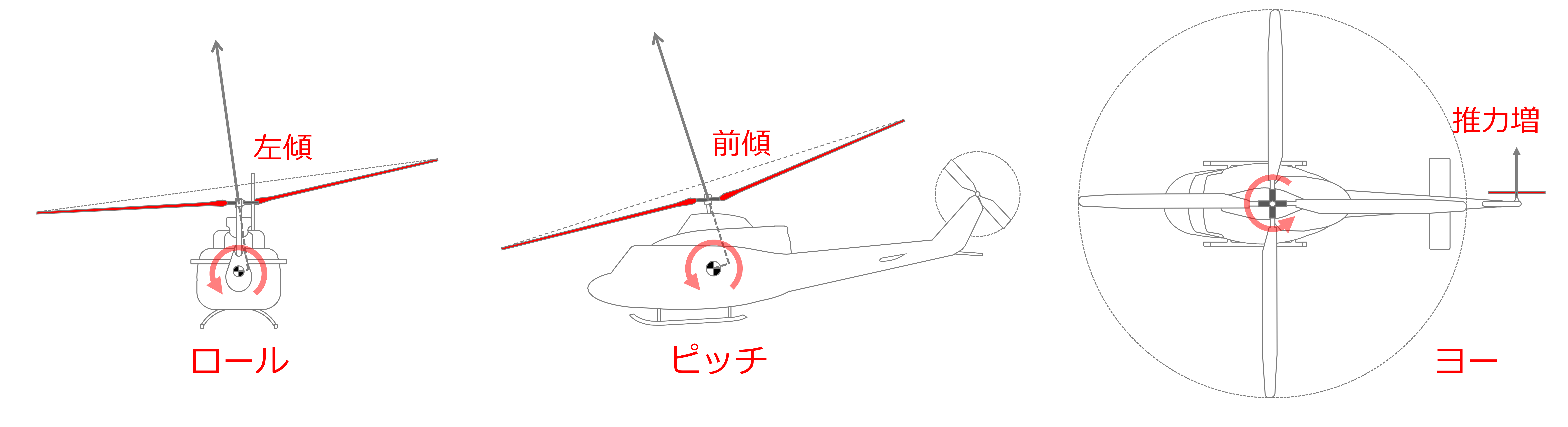
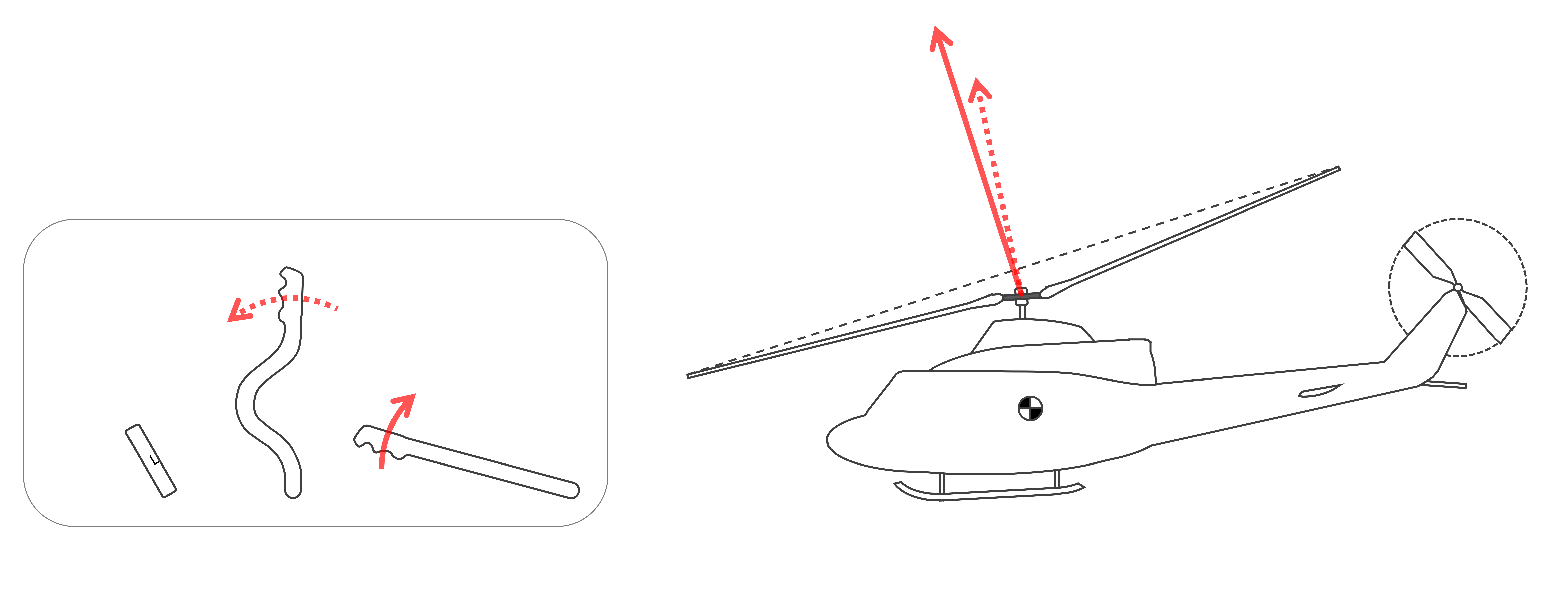
メインローターの傾きは操縦席のサイクリックスティックの操作と連動している
メインローター推力の大きさはコレクティブピッチレバーで操作し,テールローターの推力はラダーペダルで操作することができる
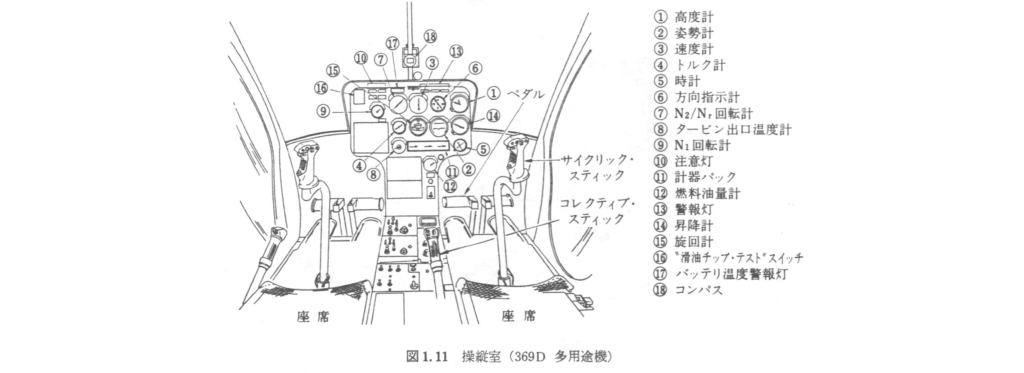
サイクリックスティック
サイクリックスティックを操作すると,ローターブレードのピッチ角が周期的に変化し,メインローター推力を好きな向きに傾けることができる
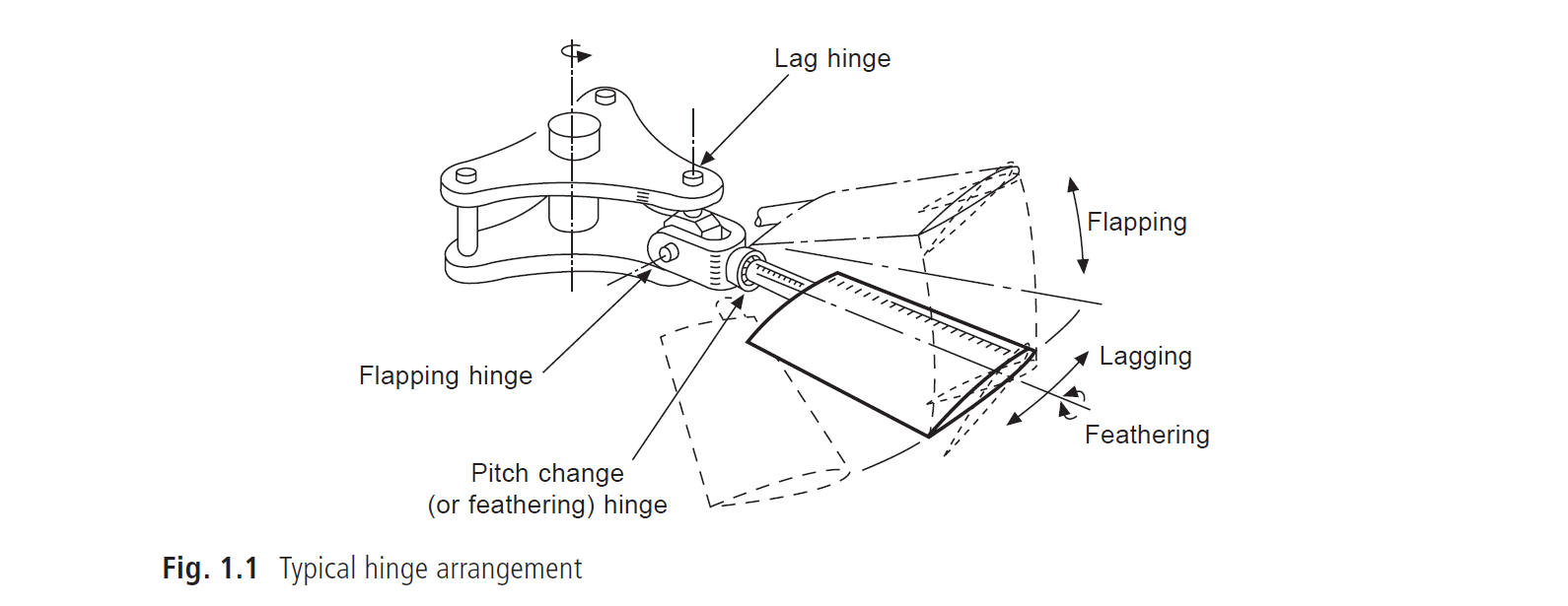
ローターブレードの根元は下図のように3つのヒンジで接続されており,そのうちフェザリング軸はブレードのピッチ角(取り付け角)変化,フェザリング軸はブレードの上下運動を可能にしている
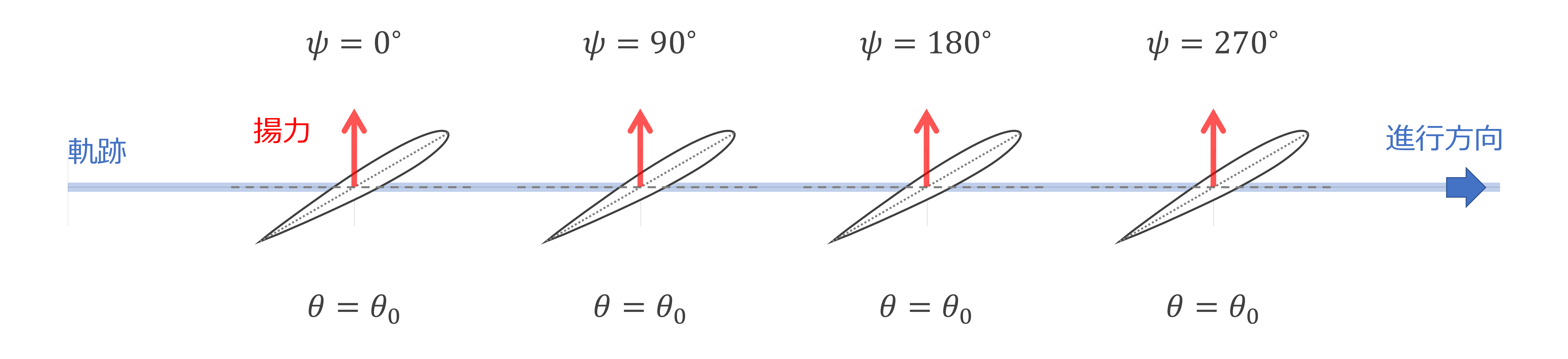
まず,ローターブレードの位置を位相角\(\psi\)を用いて次のように定義する
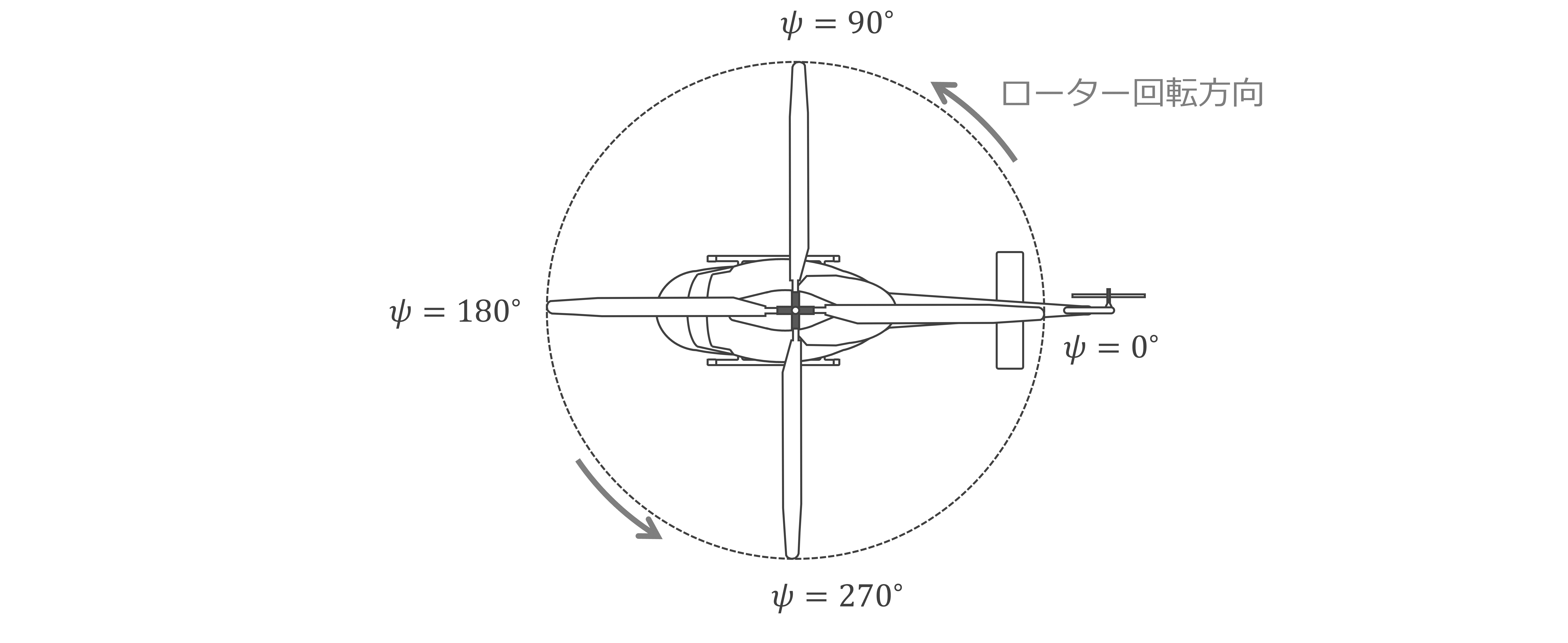
ここで,\(\psi=90^\circ\)の位置のブレードを「前進側のブレード」,\(\psi=270^\circ\)の位置のブレードを「後退側のブレード」という
このとき,ローターブレードのピッチ角\(\theta\)は次のように表される
\begin{equation}
\theta=\theta_{0}-A_{1}\cos{\psi}-B_{1}\sin{\psi}
\end{equation}
ここで,\(\theta_{0}\)はコレクティブピッチ角,\(A_{1}\)は横サイクリックピッチ角,\(B_{1}\)は縦サイクリックピッチ角という
例えば,メインローター推力を前方に傾けようとしてサイクリックスティックを前に倒すと,\(A_{1}=0\),\(B_{1}>0\)となり,ブレードのピッチ角は次のようになる
\begin{equation}
\theta=\theta_{0}-B_{1}\sin{\psi}
\end{equation}
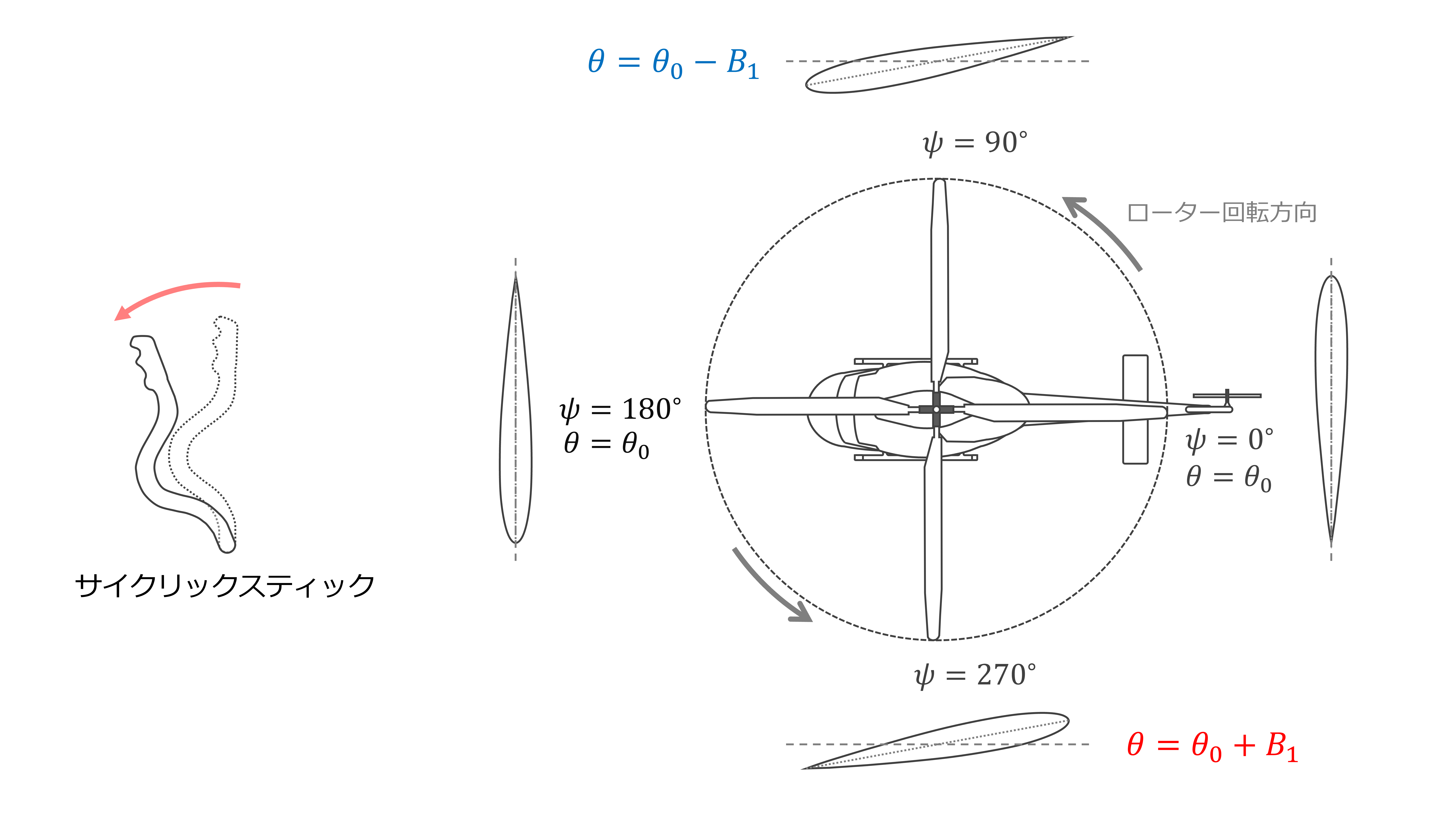
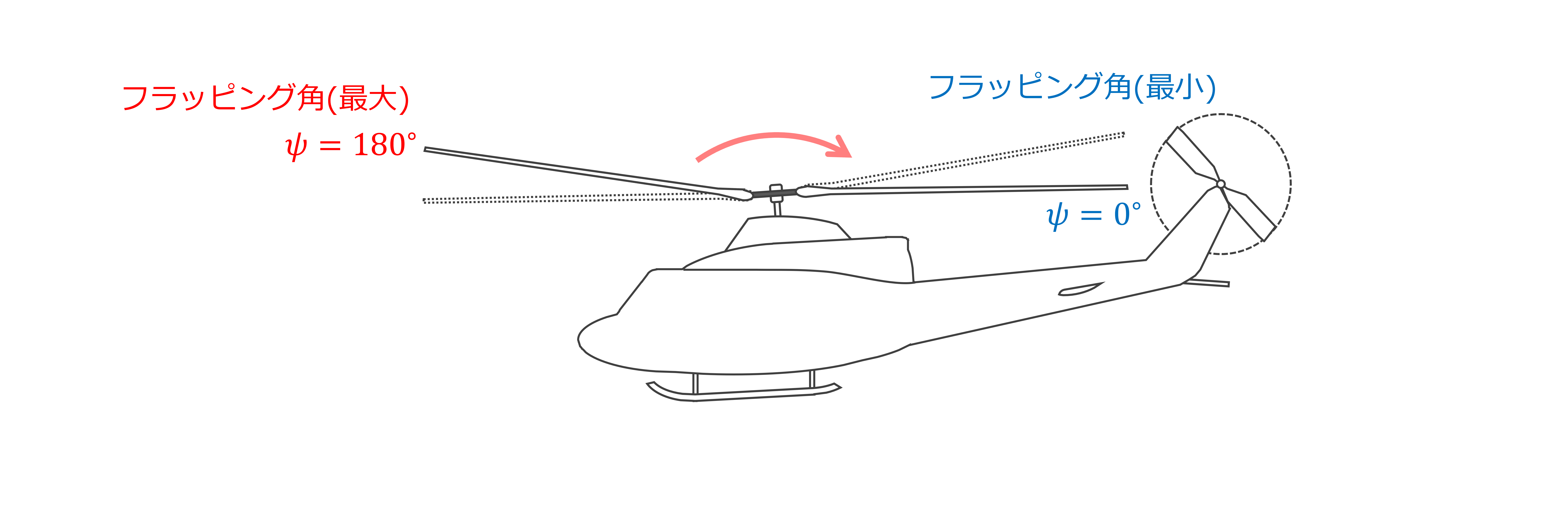
このとき,1つのブレードが1回転する間のピッチ角の変化は下の図のようになる(ブレードの外側からみる)
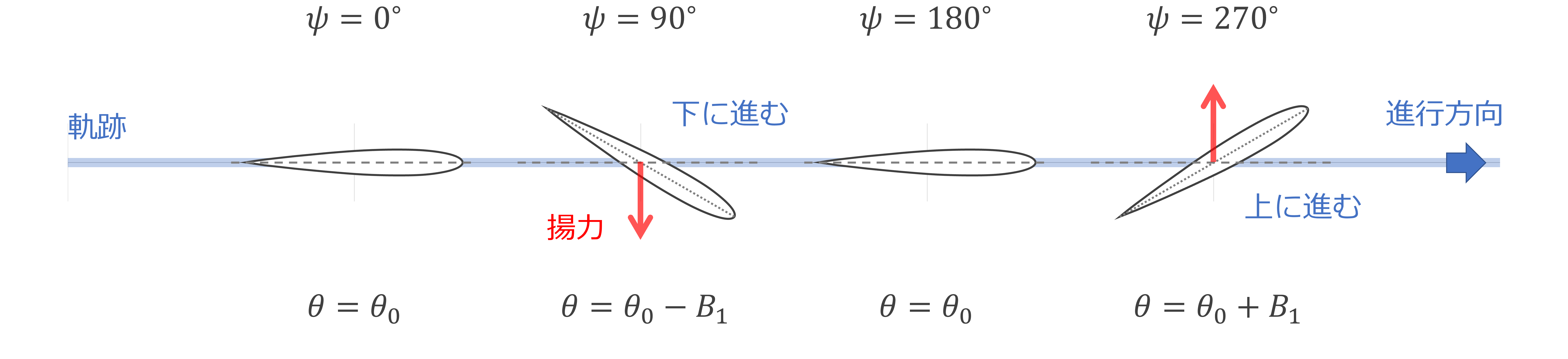
サイクリックスティックを前に倒すと\(\psi=90^\circ\)の位置ではブレードに下向きの揚力変化が発生し,\(\psi=270^\circ\)の位置では逆に上向きの揚力変化が発生する
言い換えると,サイクリックスティックの操作によってメインローターの左右に揚力の不均衡を生じさせている状態である
ローターブレードは根元のフラッピングヒンジによって上下に自由に動くことができるため,\(\psi=90^\circ\)のブレードは下向きに進行方向を変え,\(\psi=270^\circ\)のブレードは上向きに進行方向を変える
このフラッピング運動によってローターブレードの軌跡はすこしずつ変化していき,それにともなって\(\psi=90^\circ\),\(\psi=270^\circ\)のブレードの迎角および揚力変化が小さくなっていく

最終的にブレードのピッチ角と経路角が等しくなるまでブレードはフラッピング運動を続け、ブレードの迎角がゼロになった時点で回転が安定する
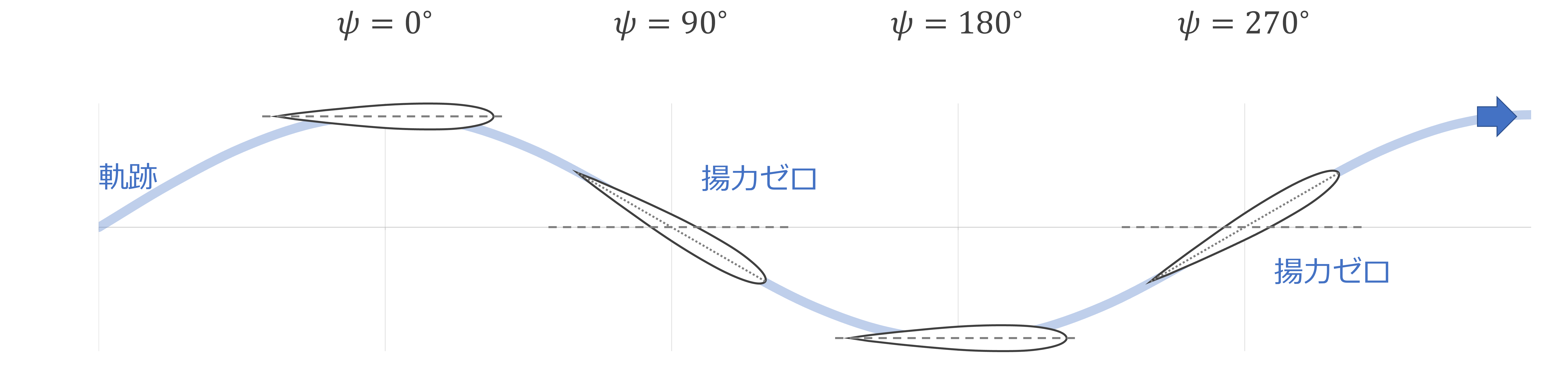
ブレードの揚力変化が1回転を通してゼロになったので,操縦桿を操作した直後に生じたメインローター回転面内の揚力の不均衡は,メインローターの回転面自体が傾くことによって解消されたことになる
以上より,サイクリックスティックを前に倒したときの位相角,ピッチ角,フラッピング角の関係をまとめると次の表のようになる
| 位相角\(\psi\) | \(0^\circ\) | \(90^\circ\) | \(180^\circ\) | \(270^\circ\) |
| ピッチ角\(\theta\) | 最小 | 最大 | ||
| フラッピング角 | 最大 | 最小 |
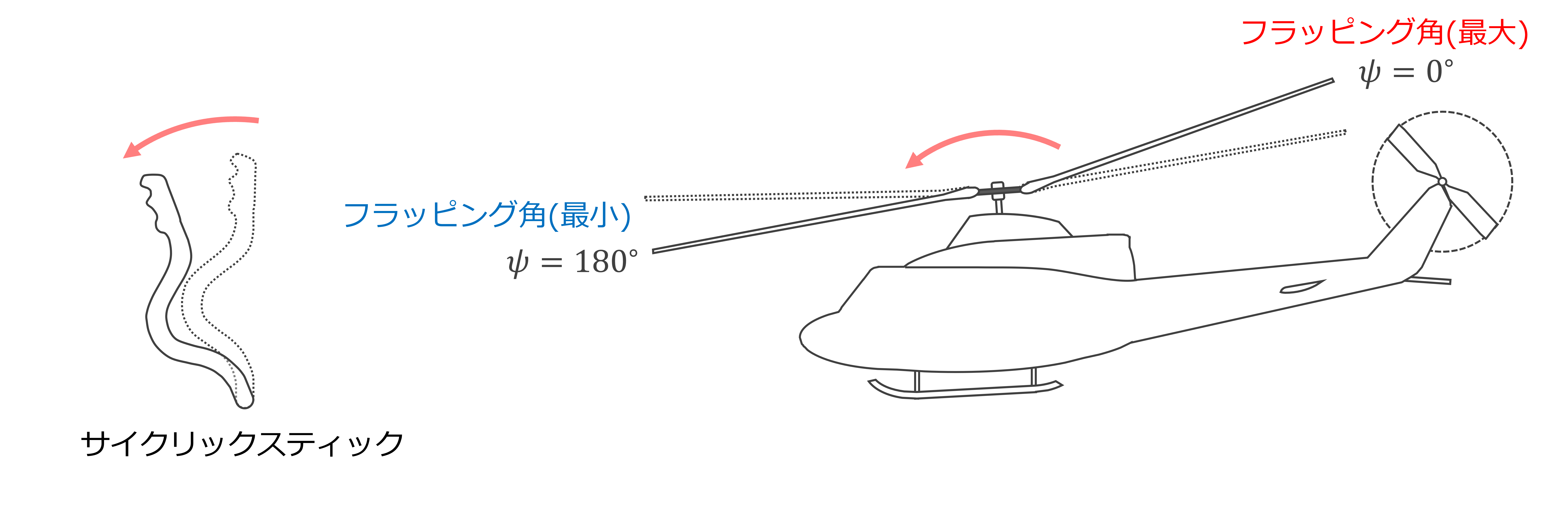
ピッチ角の最大/最小の位置に対してフラッピングの最大/最小の位置が「ブレードの回転方向に90度遅れている」ことが分かる
サイクリックスティックを前に倒すと,\(\psi=90^\circ,~270^\circ\)でブレードのピッチ角は最小/最大になり,そこからブレードの回転方向に90度遅れた位置でブレードのフラッピング角が最小/最大になる
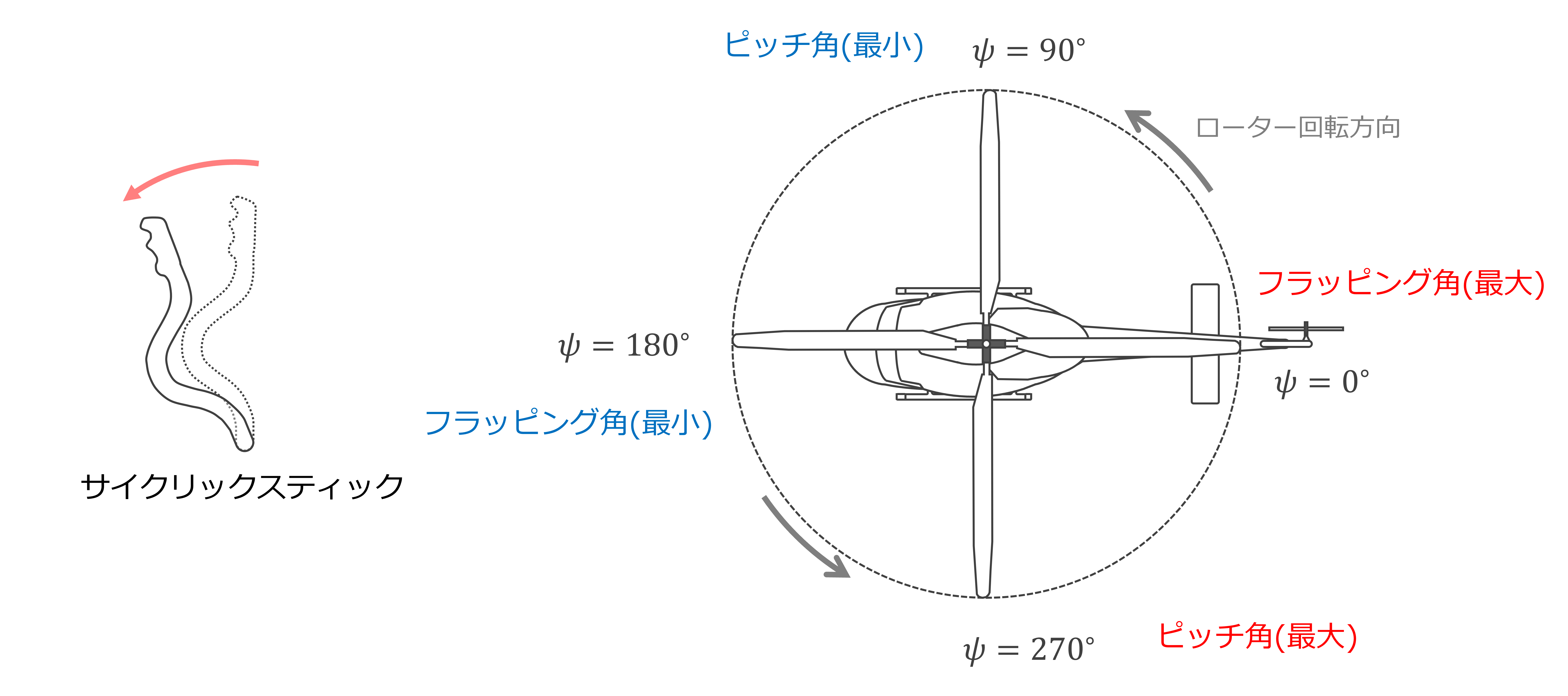
結果として,サイクリックスティックを前に倒すとメインローターを前に傾けることができるようになる
サイクリックピッチ (1/2) pic.twitter.com/4mcFB0FwnI
— いーそー (@mtk_birdman) July 10, 2022
サイクリックピッチ (2/2) pic.twitter.com/tfuf2uMASr
— いーそー (@mtk_birdman) July 10, 2022
- ローターブレードのピッチ角を周期的に変化させることによりメインローターを傾けることができる
- フラッピング角の大小の位置は、ブレードの揚力の大小の位置に対してブレードの回転方向に90度遅れる
- サイクリックスティックの傾け方とメインローターの傾き方は一致する
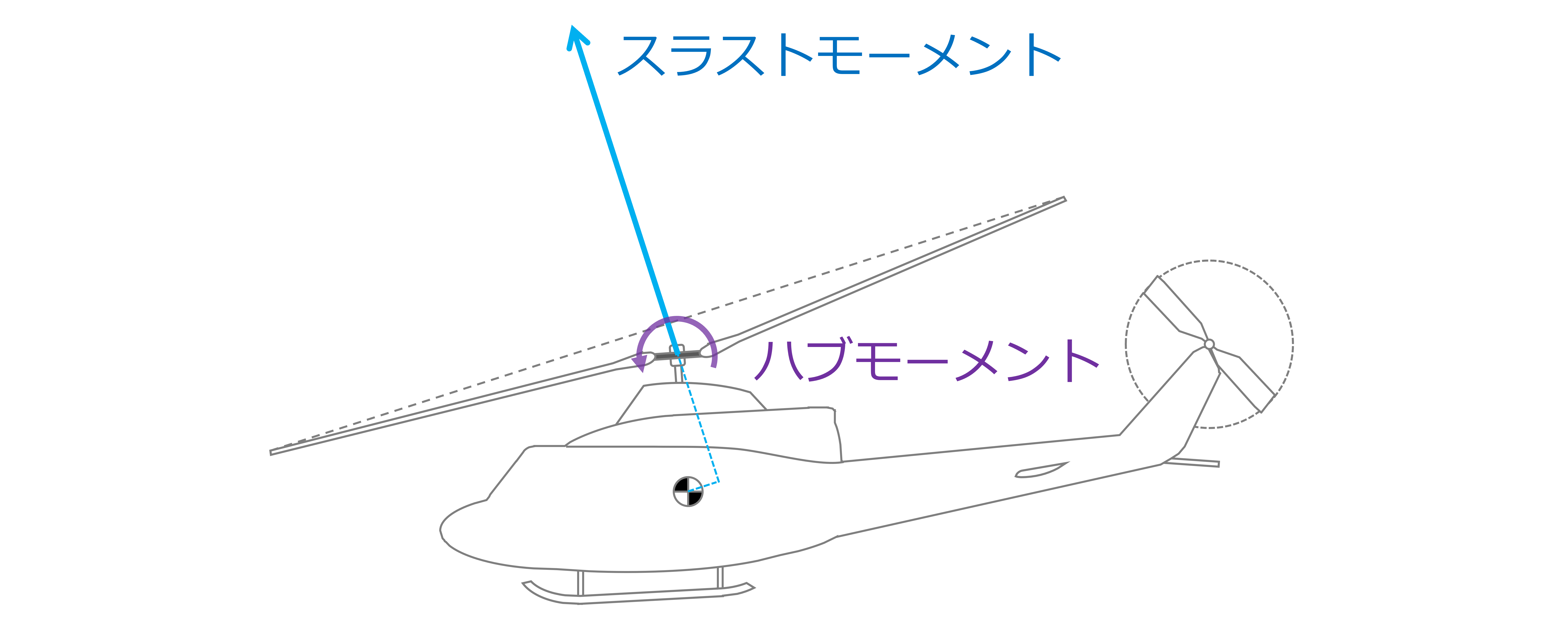
スラストモーメントとハブモーメント
ヘリコプターではメインローターを傾けることで機体重心周りのモーメントを発生させているが,このモーメントは「スラストモーメント」と「ハブモーメント」の2種類に分けることができる
利用可能なモーメントはローターハブの形式によって以下のように分けられる
| ローターハブの形式 | スラストモーメント | ハブモーメント |
| シーソー型 | 〇 | × |
| 全関節型 | 〇 | 〇 |
| ヒンジレス型 | 〇 | ◎ |
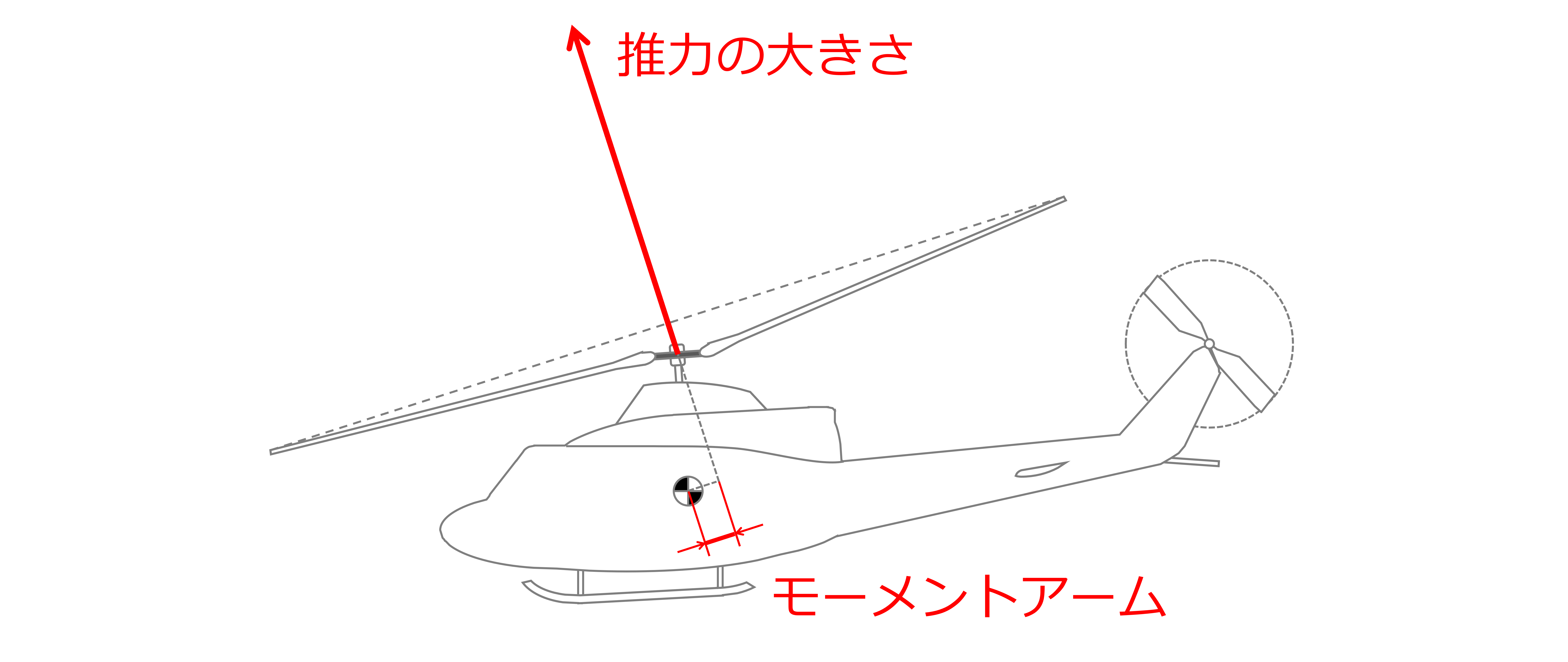
スラストモーメント
スラストモーメントは,傾けられたメインローター推力によって発生するもので(モーメントの大きさ)=(推力の大きさ)×(重心からのアームの長さ)で表される
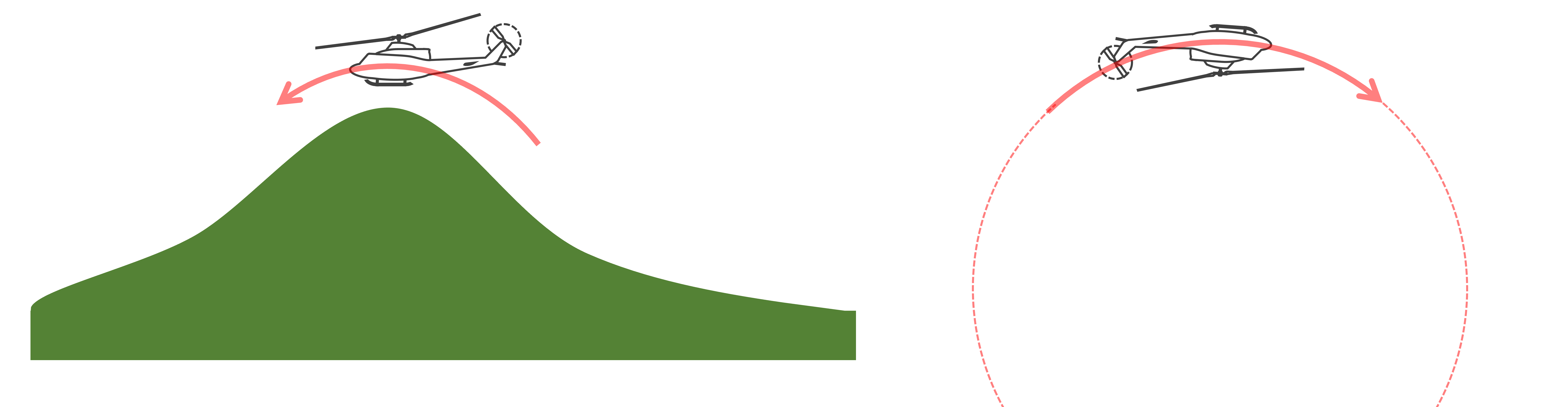
全関節型,シーソー型,ヒンジレス型問わずすべてのヘリコプターに共通した操縦方法であるが,「メインローター推力がゼロになると操縦が効かなくなる」という欠点がある
例えば,スラストモーメントしか利用できないシーソー型ローターのヘリコプターでは,メインローター推力がほぼゼロになってしまうような山越え飛行や宙返り時の背面飛行などの高機動を行うことができない
ハブモーメント
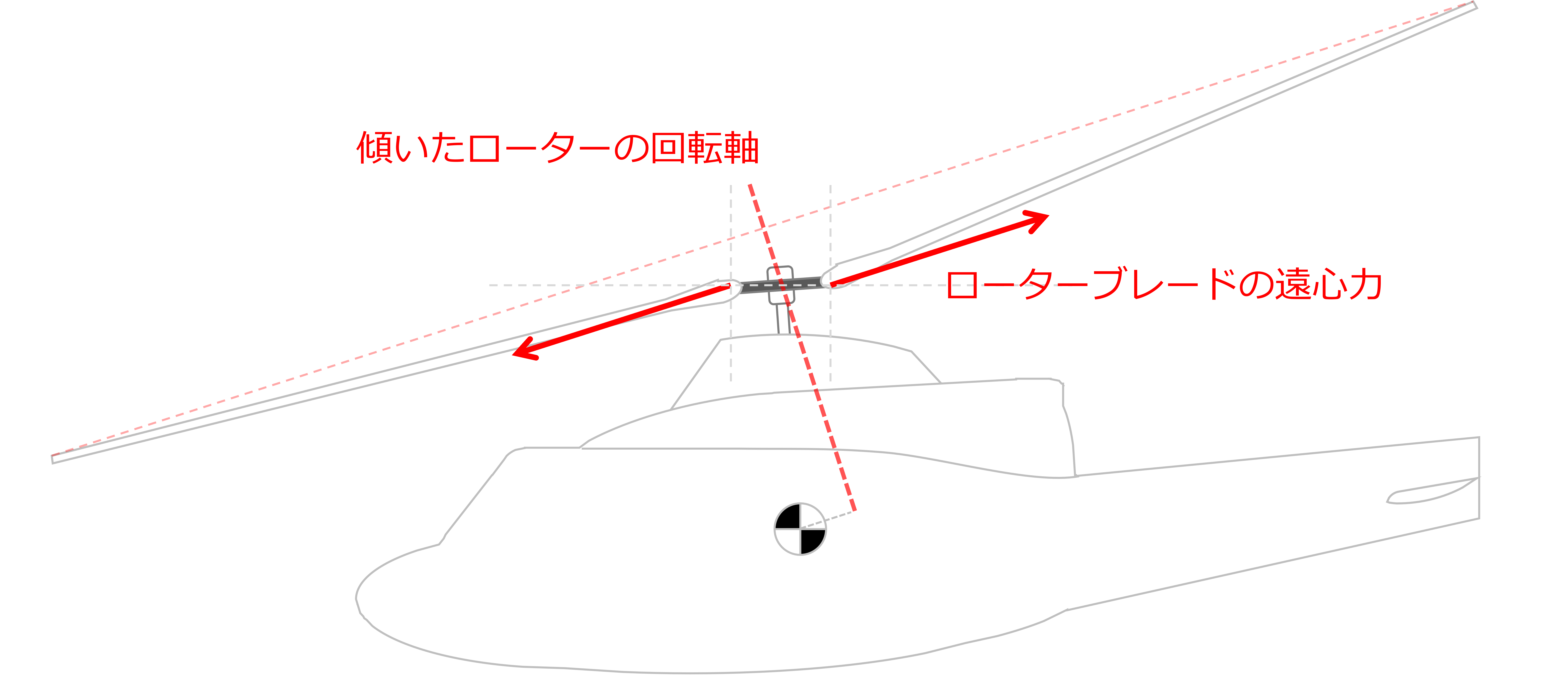
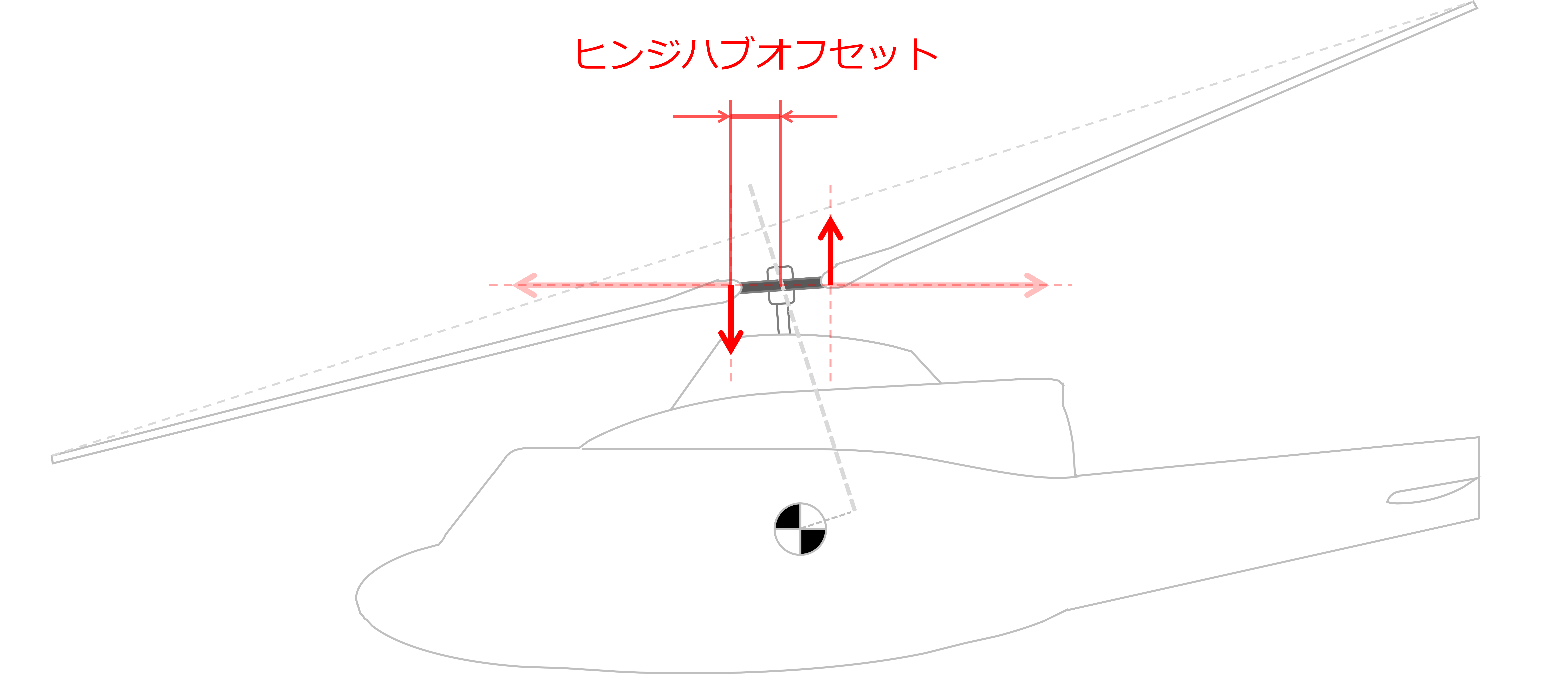
ハブモーメントは,傾いた軸に対して回転するメインローターブレードの遠心力がローターハブにはたらくことによって発生するもので(モーメントの大きさ)=(ハブ垂直方向の遠心力の大きさ)×(ヒンジハブオフセットの大きさ)で表される
※ローターハブの中心からフラッピングヒンジまでの距離を「ヒンジハブオフセット」という
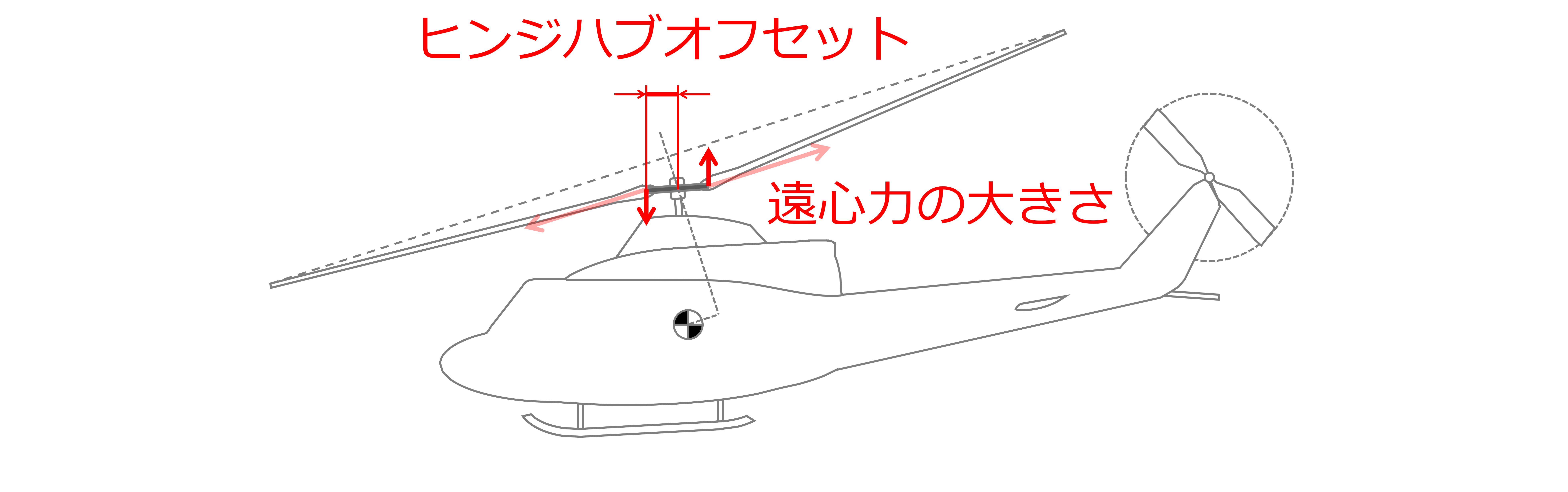
ローターブレードの遠心力は傾いたローター回転軸に対して垂直に作用し,ローターヒンジを介してローターハブに伝達される(ヒンジ接続なのでモーメントは伝わらない)
ブレードの遠心力はローターハブに対して水平方向成分と垂直方向成分に分解できる
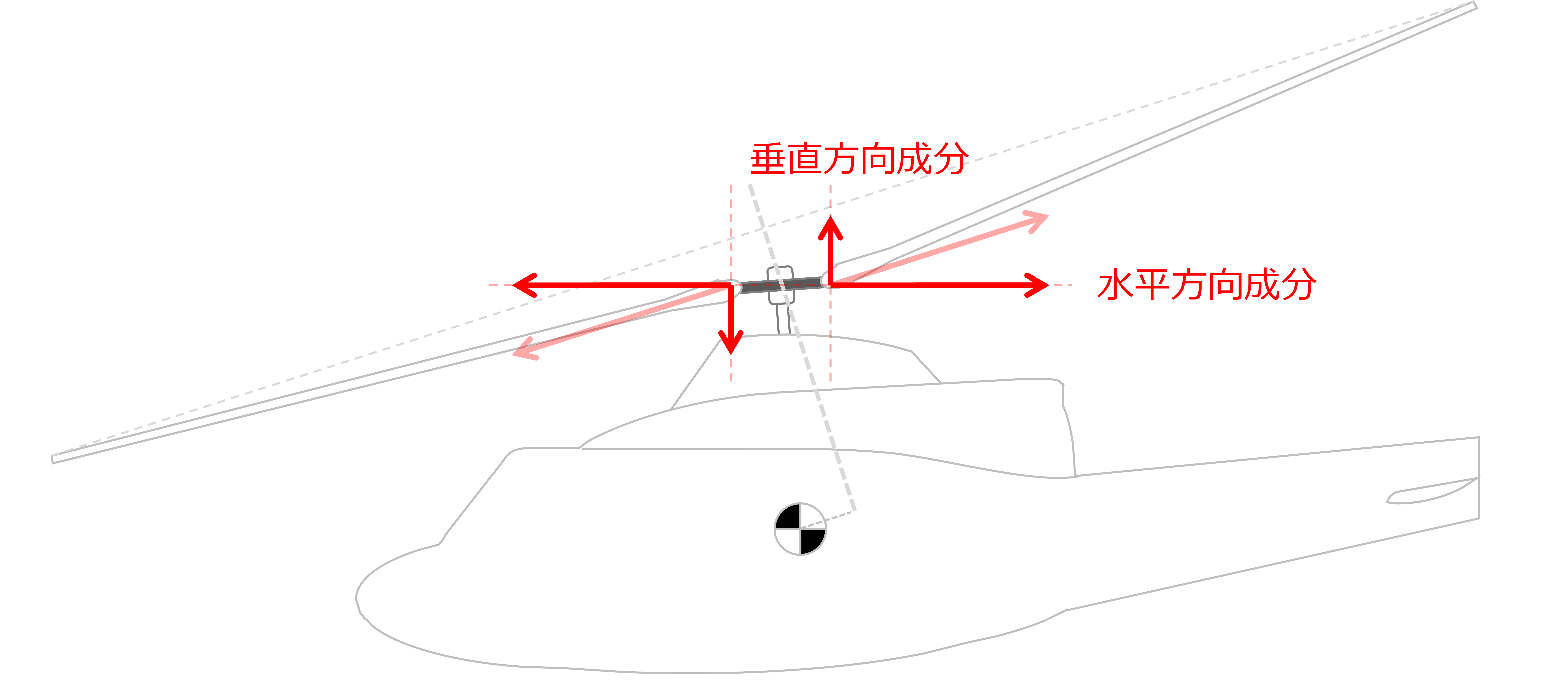
水平方向成分はローターハブ周りのモーメントに寄与しないので,(ハブモーメントの大きさ)=(ハブ垂直方向の遠心力の大きさ)×(ヒンジハブオフセット)で表すことができる
シーソー型ローターはローターハブを持たないためハブモーメントの大きさはゼロ(ヒンジハブオフセットがゼロ)で,ヒンジレス型ローターは等価的なヒンジハブオフセットが比較的大きくとれるのでハブモーメントの大きさはスラストモーメントと同じくらいになる

スラストモーメントに匹敵する大きなハブモーメントが利用可能なヒンジレス型ローターが開発されたことで,従来型ローターでは困難だった宙返りやロールを行える高機動ヘリコプターが誕生した
メインローターの傾きとスラストモーメント/ハブモーメントの大きさを動画にすると次のようになる
スラストモーメントとハブモーメント pic.twitter.com/3srJWSQJoU
— いーそー (@mtk_birdman) July 3, 2022
- 機体を傾けるモーメントはスラストモーメントとハブモーメントの2種類に分けられる
- スラストモーメントはメインローター推力によるモーメントで,すべての形式のヘリコプターで利用できる
- ハブモーメントはローターブレードの遠心力によるモーメントで,シーソー型ローターを除く形式のヘリコプターで利用できる
- メインローター推力がゼロになるような高機動はハブモーメントを利用することで実現可能になった
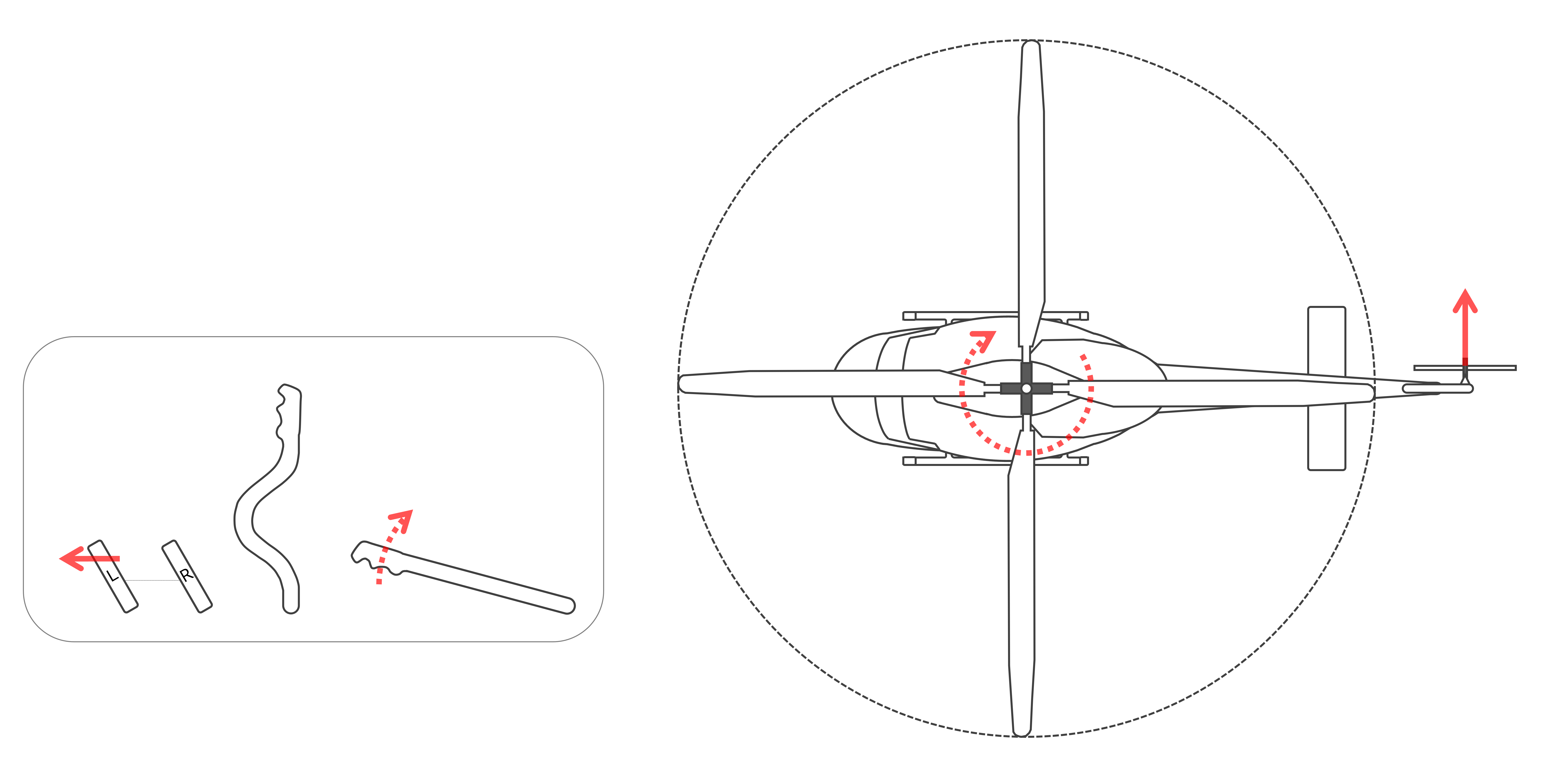
コレクティブピッチ
コレクティブピッチレバーを操作すると,ローターブレードのピッチ角が一様に変化し,メインローター推力を変化させることができる
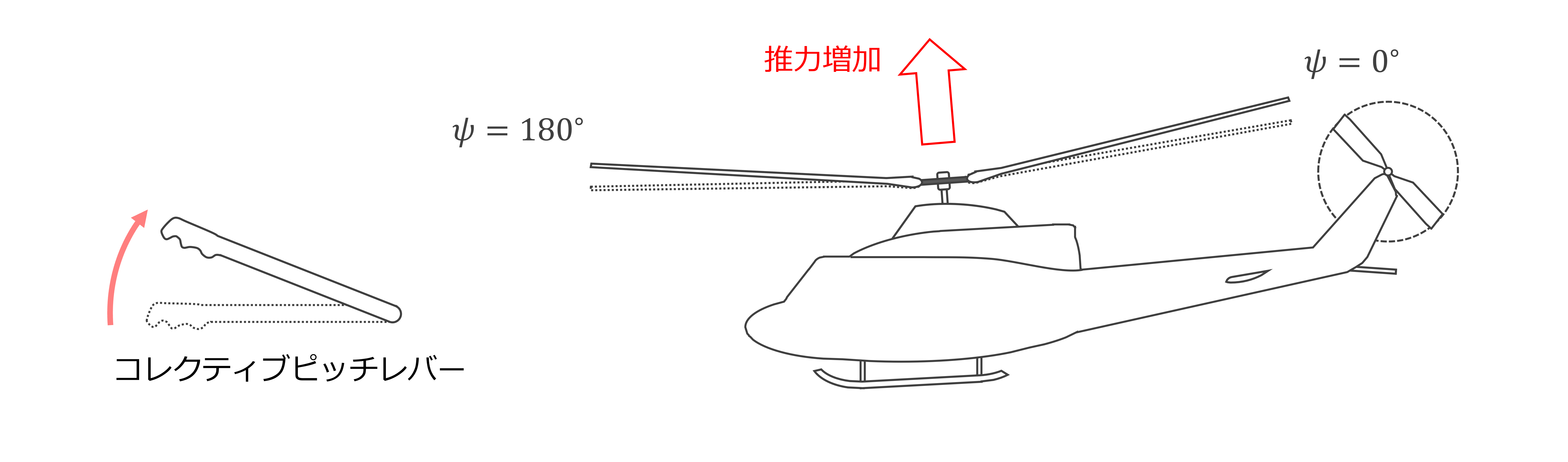
コレクティブピッチレーバーを上げてローター推力を増加させたときは同時にブレードの抗力も増加しているため,ローターの回転数を維持するためのエンジントルクも増大している
ラダーペダルを踏んだときも同様にテールローターのコレクティブピッチ角が変化し,テールローター推力を調整している
コレクティブピッチ pic.twitter.com/AgciNvHWWe
— いーそー (@mtk_birdman) July 10, 2022
各舵のコーディネート
トリムの項で説明したように,ヘリコプターは空力的に左右非対称であり,メインローター推力の向き、大きさ、テールローター推力という3つの要素は互いに影響しあっている
そのため,どれか1つを操舵した場合は残りの2つも調和するように操舵しなければならない
例えば,前進飛行をしているときに高度を保ったまま増速するためには以下の操作が必要になる
- サイクリックスティックを前に倒す
- 鉛直方向の推力減を補うためにコレクティブピッチレバーを上げる
- メインローターの反トルク増加を相殺するために左ラダーを踏む
- テールローター推力とつりあわせるためにサイクリックスティックを左に倒す
増速するためには推力を前に傾ける必要がある
推力が前に傾くと推力の鉛直方向成分が小さくなってしまうので,コレクティブピッチレバーを上げることで推力を大きくし,推力の鉛直方向成分と重力がつりあうようにする
コレクティブピッチレバーを上げるとブレードのピッチ角の増加によりブレードの抗力が増加するため,ローターを回すためのエンジントルクが増加する
エンジントルクが増加するとその反トルクで機首が右に向けられてしまうので,左ラダーを踏んで機首を正面に保つようにする
左ラダーを踏むとテールローター推力が増加するので,サイクリックスティックを左に倒してメインローター推力を左に傾け,左右方向の力のつり合いを保つ

実際にはこれらの操作は同時に行うため,前進飛行時に増速する際は「サイクリックスティックを前方やや左に倒しつつコレクティブピッチレバーを上げて左ラダーを踏む」という操舵が必要になる
ヘリコプターでは次のような各舵のコーディネートが必要である
- 縦サイクリックスティック → コレクティブピッチレバー
- コレクティブピッチレバー → ラダーペダル
- ラダーペダル → 横サイクリックスティック
安定性
安定性とは「機体の状態がつりあいから外れたときに復元力(元のつり合い状態に戻る方向の力やモーメント)が発生する」という性質である(静安定)
この復元力によって機体はつりあい状態を中心に振動を始めるが,機体にはたらく減衰力によってその振幅は徐々に小さくなる(動安定)
固定翼機とヘリコプターの安定性を比較すると次のようになる
| 安定微係数 | 固定翼機 | ヘリコプター | |
| 速度安定 | \(X_{u}\) | 正 | 正 |
| 迎角安定 | \(M_{\alpha}\) | 正 | 負(~低速) 正(中速~) |
| 横安定 | \(L_{\beta}\) | 正 | 正 |
| 方向安定 | \(N_{\beta}\) | 正 | 正 |
| ※ | \(M_{u}\) | ゼロ | 正 |
| ピッチ減衰 | \(M_{q}\) | 正 | 正 |
| ロール減衰 | \(L_{p}\) | 正 | 正 |
| ヨー減衰 | \(N_{r}\) | 正 | 正 |
固定翼機とヘリコプターの大きな違いは以下の2点である
- ホバリングから低速飛行時は迎角不安定
- 速度変化によって機体重心周りのモーメントが発生する
上記2点以外については固定翼機と同様の性質を持っているので,安定微係数の計算さえできてしまえば,あとは固定翼機と同じように議論を行うことができる
上反角効果や風見効果と同じような性質も持っているので,スパイラルモードもダッチロールモードも存在する
上記の表中のそれぞれの安定性/減衰性の具体的な説明は以下の通り
速度安定:機体の速度が増えたときに,減速する方向に力がはたらく

迎角安定:機体の迎角が大きくなったときに,頭を下げる向きにピッチングモーメントがはたらく

横安定:機体がバンクしたときに,機体を水平に戻す向きにローリングモーメントがはたらく
方向安定:機体が横滑りしたときに,風上に機種を向ける方向にヨーイングモーメントがはたらく
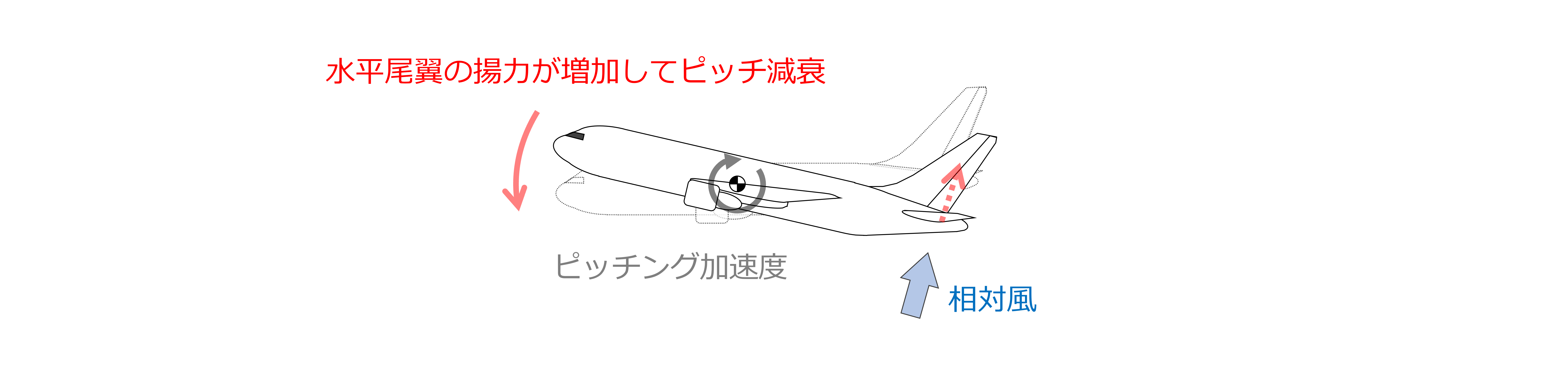
ピッチ減衰:ピッチング運動中にそれを妨げる方向にピッチングモーメントがはたらく
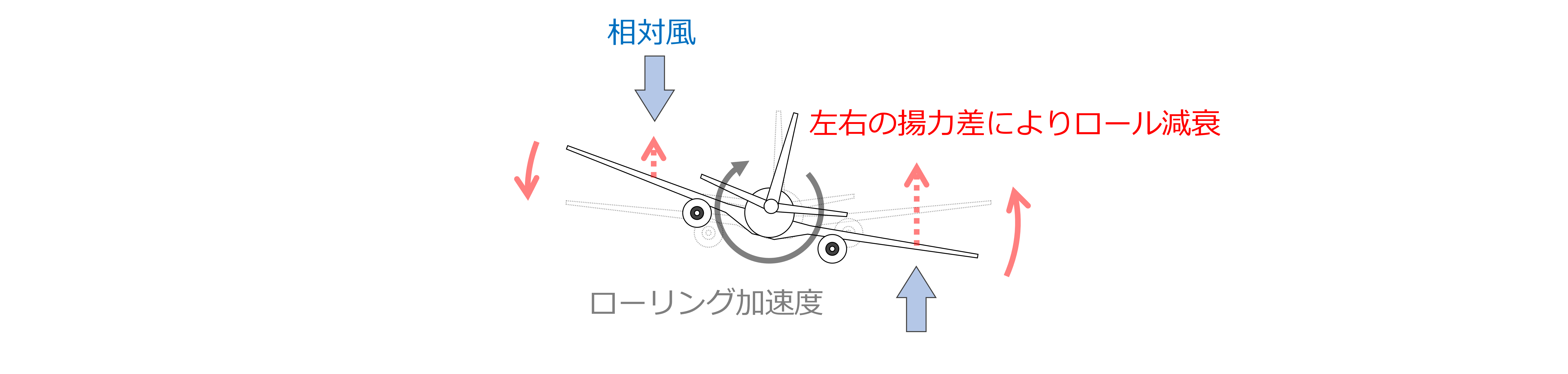
ロール減衰:ローリング運動中にそれを妨げる方向にローリングモーメントがはたらく
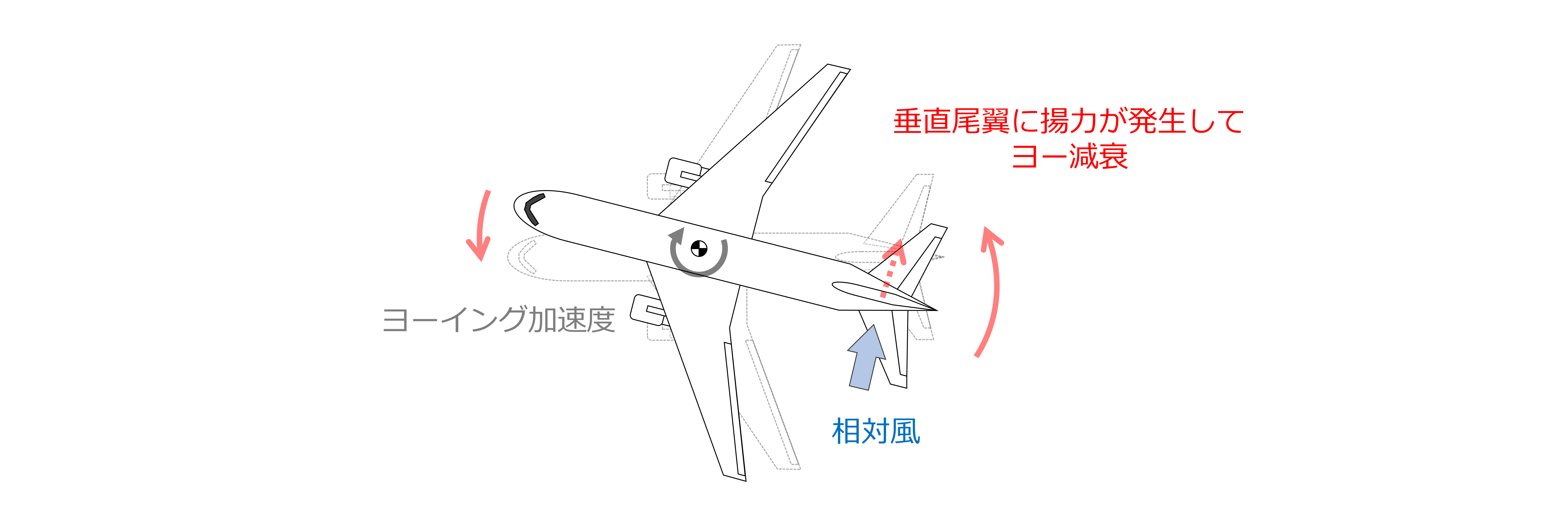
ヨー減衰:ヨーイング運動中にそれを妨げる方向にヨーイングモーメントがはたらく
メインローター単体の安定性
ヘリコプターの各パーツがそれぞれの安定性に与える影響は以下の表のようになる
| 安定微係数 | メインローター | テールローター | 水平安定板 | 垂直安定板 | |
| 速度安定 | \(X_{u}\) | 正 | - | - | - |
| 迎角安定 | \(M_{\alpha}\) | 負 | - | 正 (前進飛行時) | - |
| 横安定 | \(L_{\beta}\) | 正 | - | - | - |
| 方向安定 | \(N_{\beta}\) | - | 正 | - | 正 (前進飛行時) |
| ※ | \(M_{u}\) | 正 | - | - | - |
上の表からもわかる通り,ヘリコプターの安定性を理解するためにはメインローター単体の安定性を理解することが重要になる
水平安定板と垂直安定板のはたらきは固定翼機と同じようなものである(ただしホバリング時は速度ゼロなので機能しない)
ヘリコプターのローターは「ローター回転面内に揚力の不均衡が生じると,回転面の傾きが自動的に変化することでそれを解消する」という性質を持っている
ここではメインローターが「水平方向の速度」「垂直方向の速度」「角速度」を持ったときの回転面の運動について説明していくが,どれもまずローター回転面内に揚力の不均衡が生じ,それを解消するために回転面が傾く,という流れになっている
回転面の傾く方向は「揚力の不均衡の向きからブレードの回転方向に90度遅れた向き」と決まっているので,あとは速度や角速度によってローター回転面内にどのような揚力の不均衡ができるのかを考えればいい
サイクリックスティックで回転面内を傾けるときの説明とほぼ同じである
まず,ローターブレードの位置を位相角\(\psi\)を用いて次のように定義する
このとき,何らかの要因で\(\psi=90^\circ\)の位置で揚力が増加し,\(270^\circ\)の位置で揚力が減少したとすると,揚力の不均衡の向きは\(\psi=270^\circ\)の方向になる
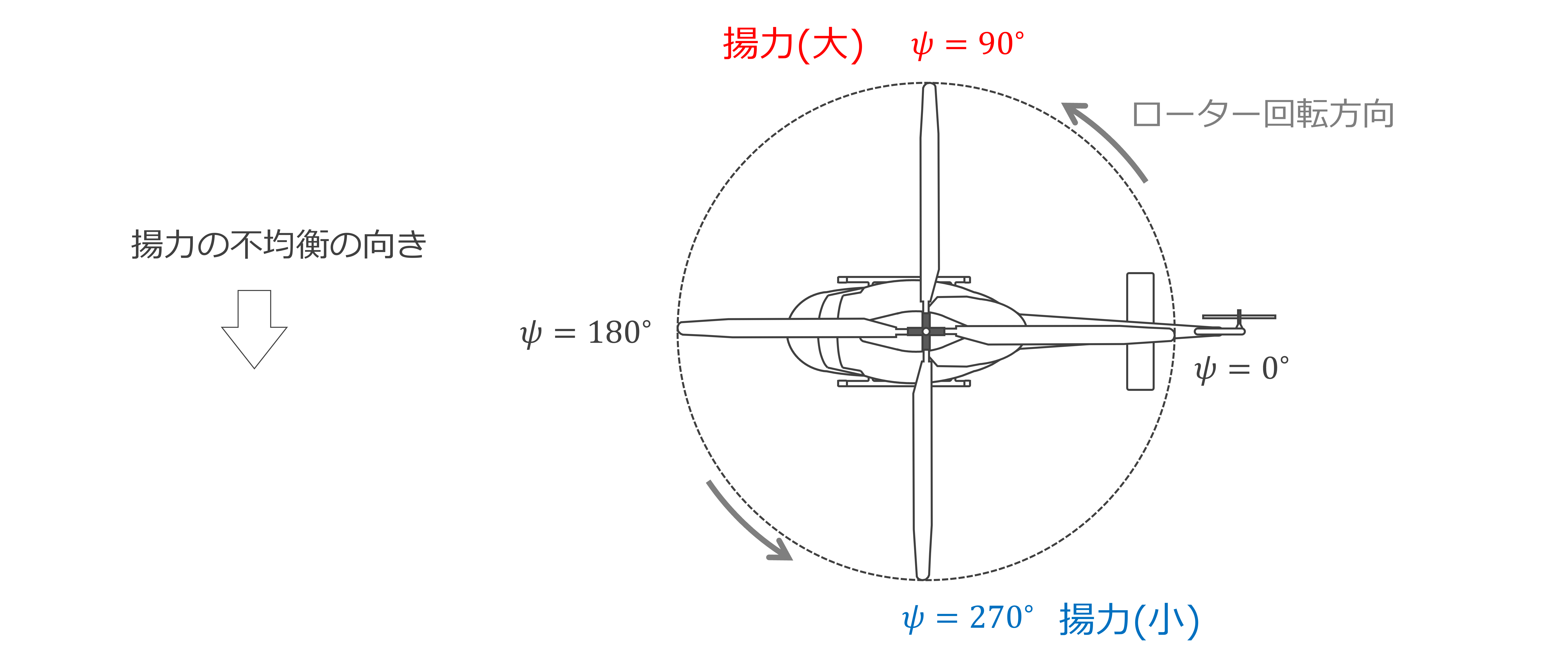
1つのブレードが1回転する間の揚力変化は下の図のようになる(ブレードの外側からみる)
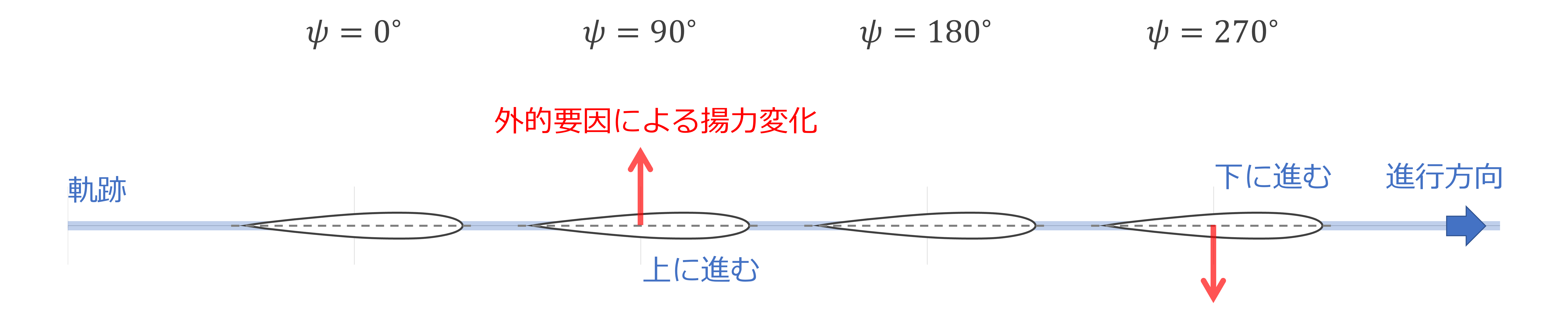
ローターブレードは根元のフラッピングヒンジによって上下に自由に動くことができるため,\(\psi=90^\circ\)のブレードは上向きに進行方向を変え,\(\psi=270^\circ\)のブレードは下向きに進行方向を変える
この運動によってローターブレードの軌跡はすこしずつ変化していき,それにともなって\(\psi=90^\circ\),\(\psi=270^\circ\)のブレードに,迎角(ピッチ角と経路角の差)による揚力変化がはたらいてくる(外的要因による揚力変化とは逆向き)
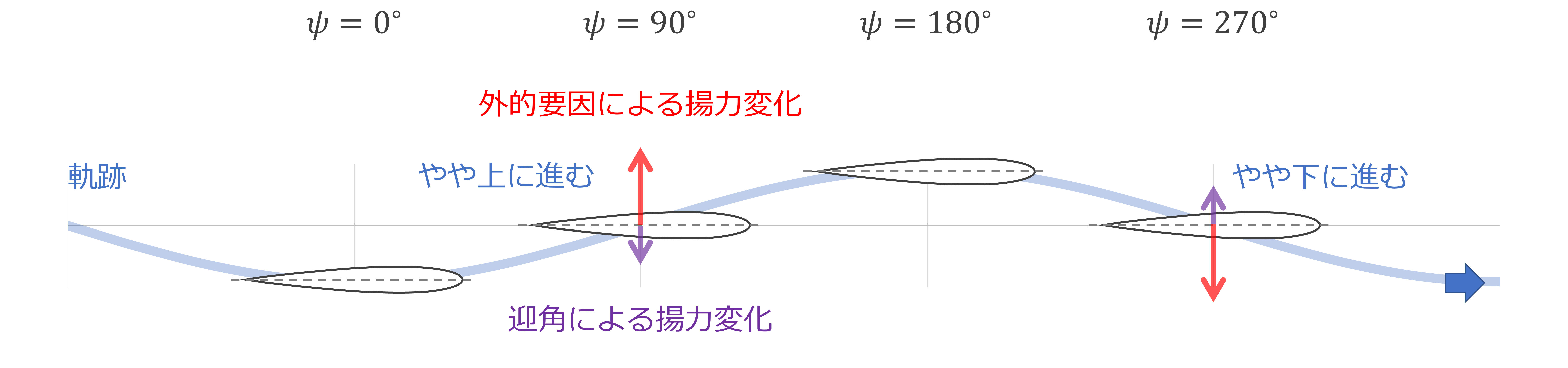
最終的に外的要因による揚力変化と迎角による揚力変化が相殺してゼロになるまでブレードはフラッピング運動を続け、ブレードに対するトータルの揚力変化がゼロになった時点で回転が安定する
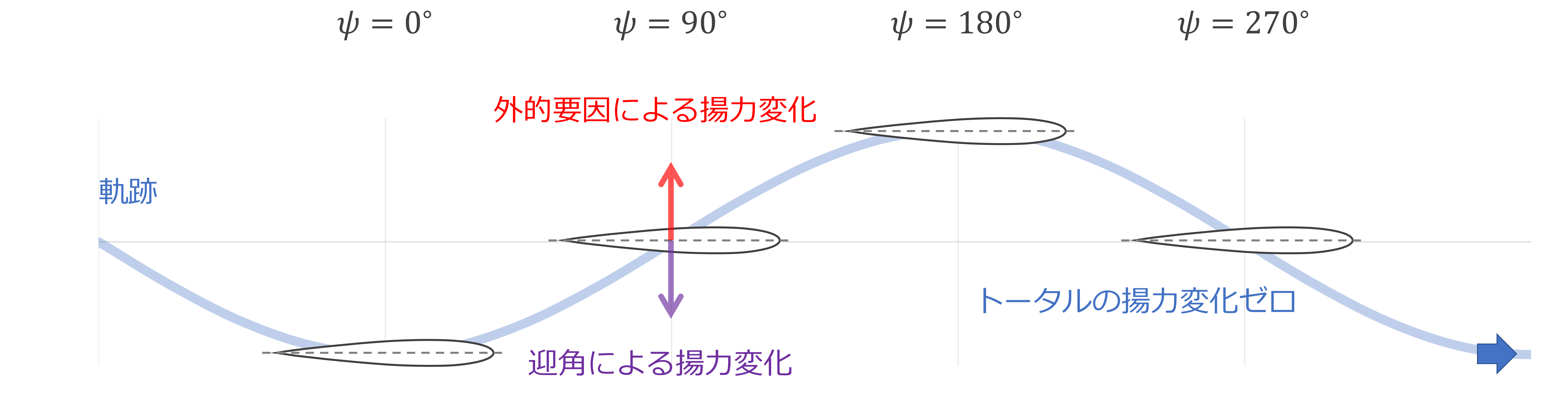
ブレードの揚力変化が1回転を通してゼロになったということは,外的要因によって生じた回転面内の揚力の不均衡が,回転面自体が傾くことによって解消されたことになる
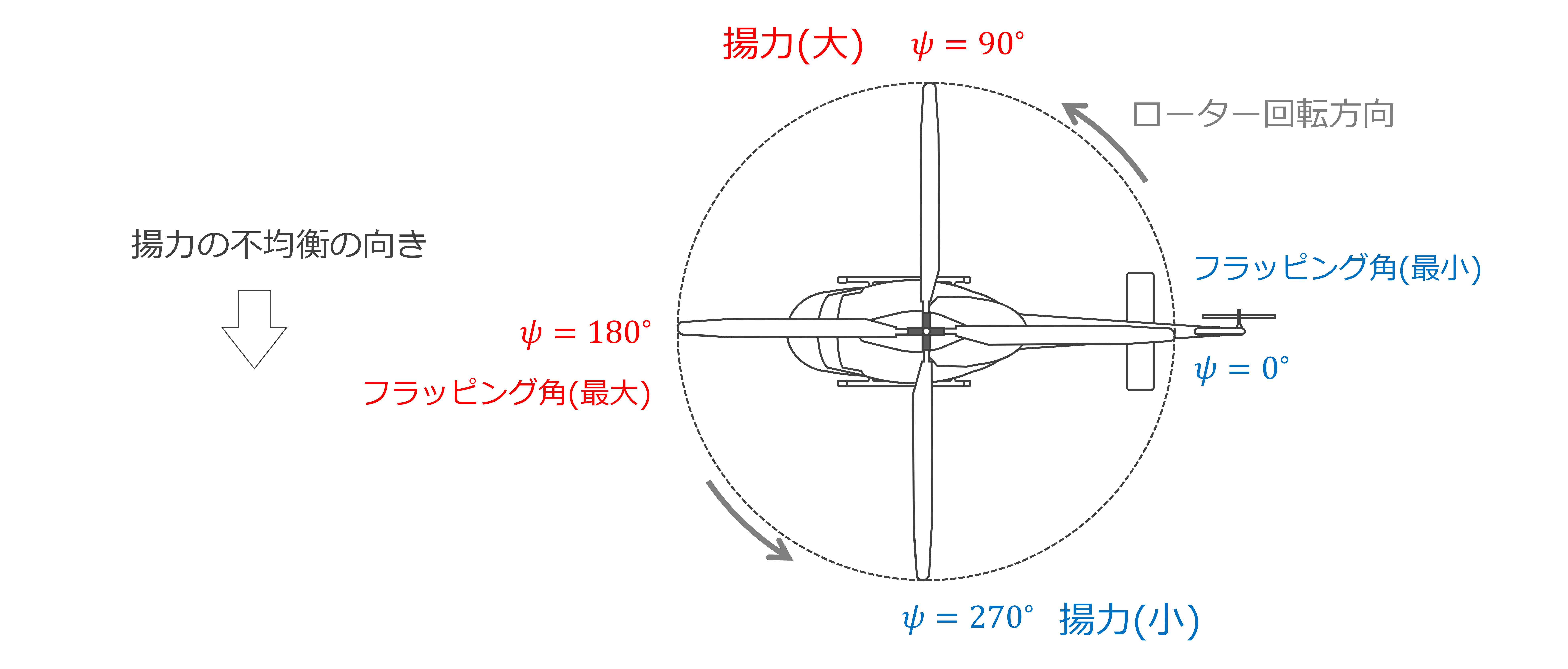
ローター回転面内に揚力の不均衡が生じたときの位相角,外的要因による揚力変化,フラッピング角の関係をまとめると次の表のようになる
| 位相角\(\psi\) | \(0^\circ\) | \(90^\circ\) | \(180^\circ\) | \(270^\circ\) |
| 外的要因による揚力変化 | - | 増加 | - | 減少 |
| フラッピング角 | 最小 | - | 最大 | - |
揚力の増加/減少の位置に対してフラッピングの最大/最小の位置がブレードの回転方向に90度遅れていることが分かる
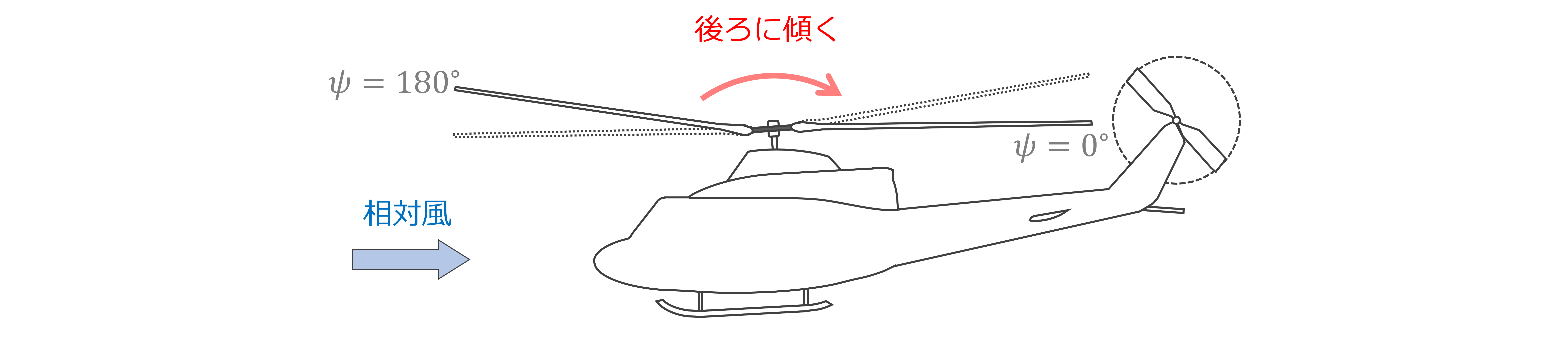
今回の例のように,\(\psi=90^\circ\)で揚力が増加し,\(\psi=270^\circ\)で揚力が減少するような揚力の不均衡が生じると,ローター回転面は揚力不均衡の向き(\(\psi=270^\circ\))からブレード回転方向に90度遅れた向き(\(\psi=0^\circ\))に傾く
すなわち,ローター回転面は後傾することになる
- メインローターは,ローター回転面内に揚力の不均衡が生じると,回転面の傾きが自動的に変化することで揚力の不均衡を解消する
- 回転面は揚力の不均衡の向きからブレードの回転方向に90度遅れた向きに傾く
それではより詳しく説明していく
水平方向の速度
メインローターに対する水平方向の速度が増加すると,ローター回転面は水平方向の速度に対して後傾する
ローターブレードの相対速度は (水平方向の速度)+(ローターの回転速度) によって計算できるため,水平方向の速度に対して前進側のローターでは相対速度が増加し,後退側のローターでは相対速度が減少する
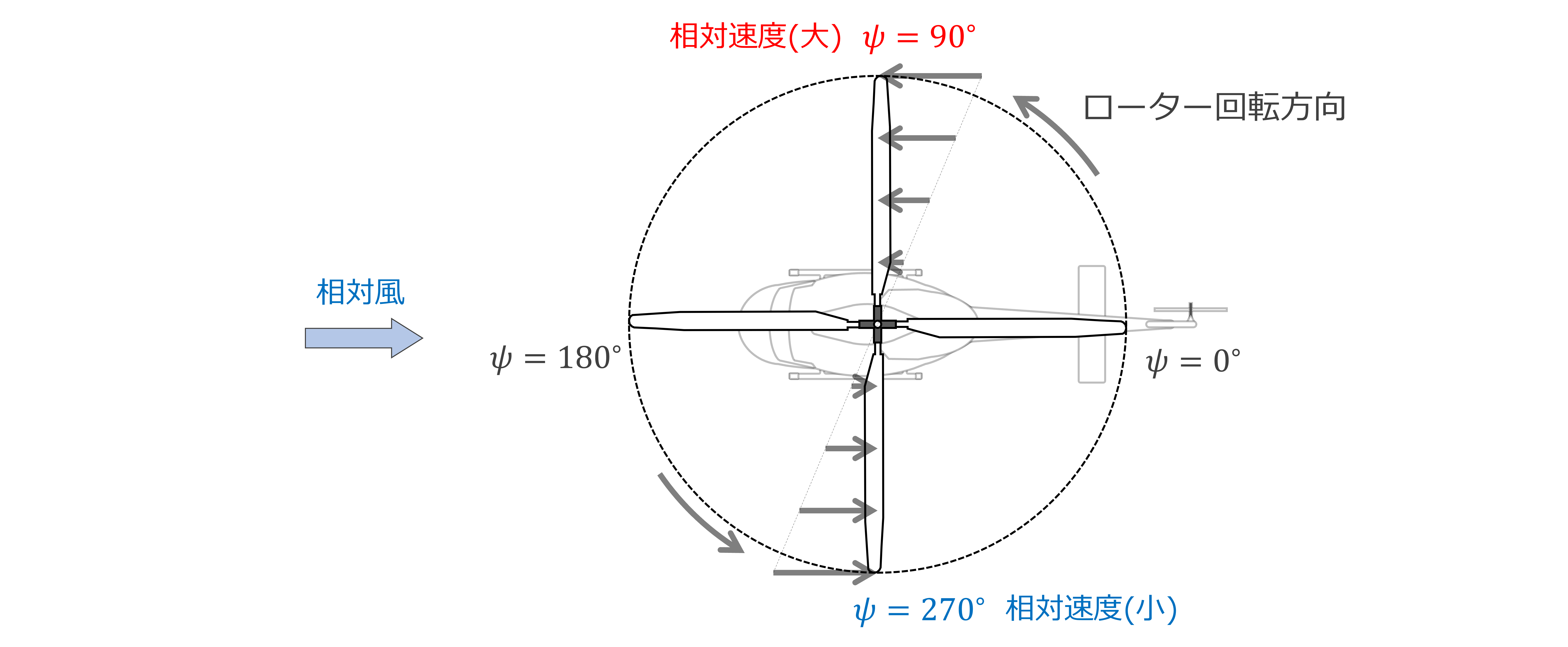
相対速度が増加した前進側のブレードでは揚力が増加し,逆に相対速度が減少した後退側のブレードでは揚力が減少するので,ローター回転面内に揚力の不均衡が生じる
結果として,ローター回転面は水平方向の速度に対して後傾することになる
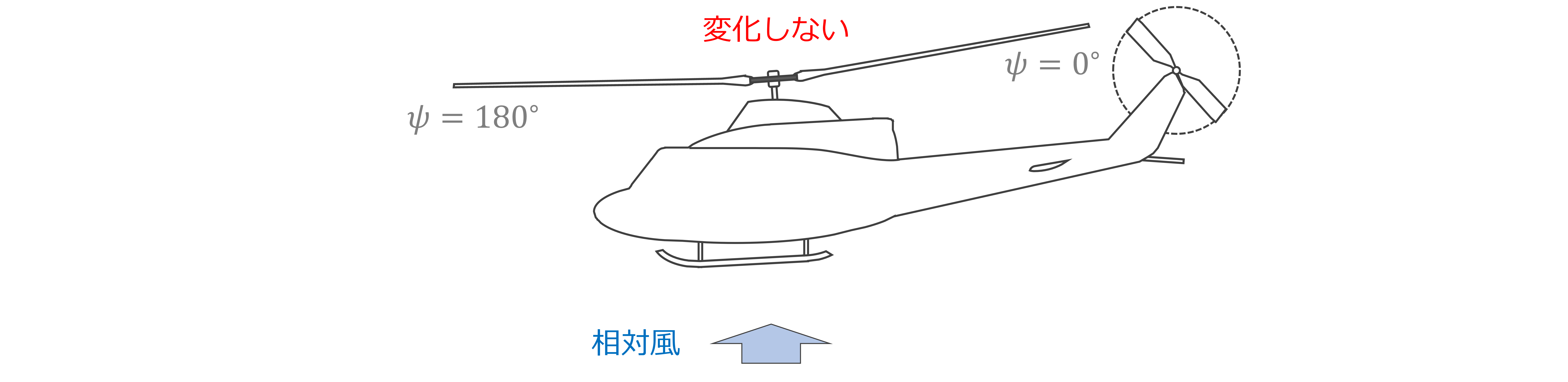
垂直方向の速度
ホバリング中(水平方向の速度がゼロのとき)に垂直方向の速度が加わっても,ブレードの迎角はローター回転面内で一様に変化するため,ローター回転面の傾きも変化しない
一方、前進飛行中に垂直方向の速度が加わることで迎角が増加した場合,ローター回転面は後傾する
ヘリコプターが前進飛行しているときは,前進速度によるローター回転面の後傾を相殺するようにサイクリックスティックを前に倒している状態である
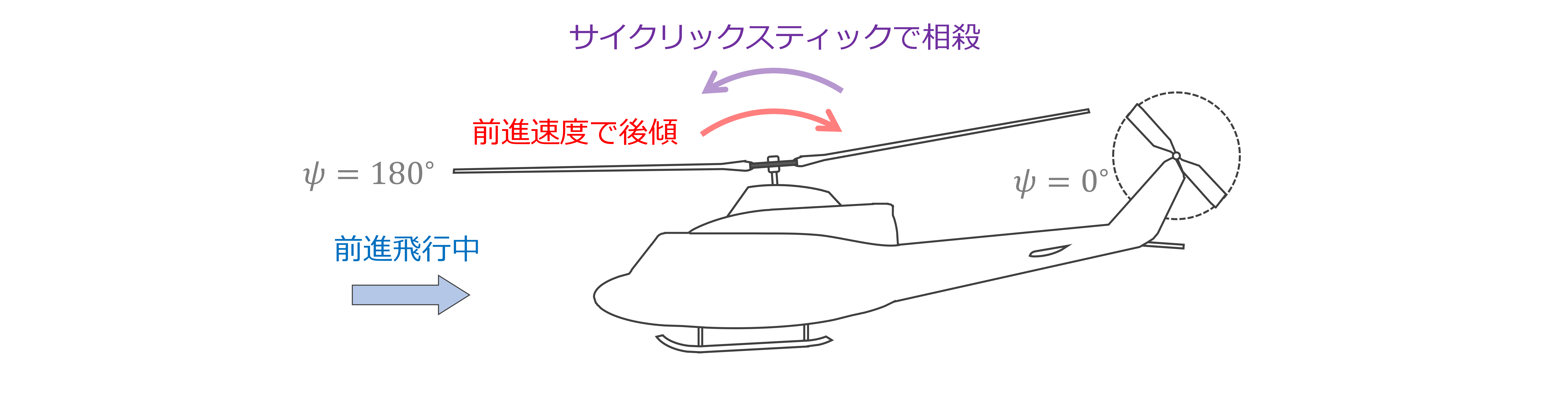
ローターブレードの相対速度は前進側のブレードの方が後退側のブレードよりも大きくなっているものの,サイクリックスティックを用いたピッチ角操作により1回転の間にブレードに発生する揚力変化はゼロに保たれているため,ローター回転面内に揚力の不均衡は発生していない
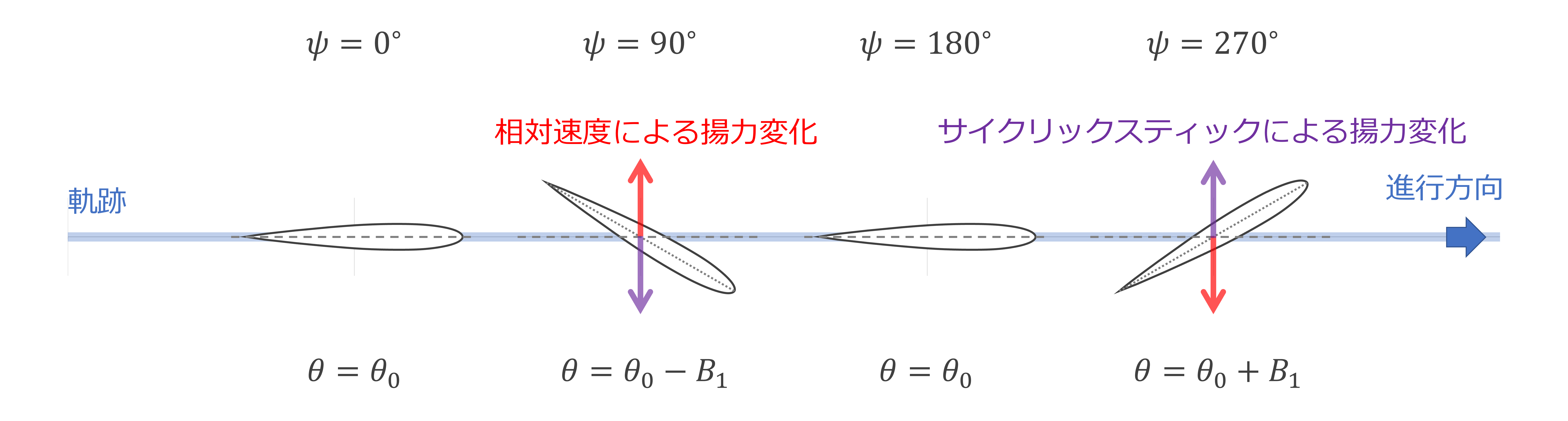
この状態で,垂直方向の速度によってローター回転面内のブレードの迎角が増加すると,揚力の増加分は相対速度が大きい前進側のブレードで大きく,相対速度の小さい後退側のブレードで小さくなる
\begin{equation}
\Delta L = \frac{1}{2}\rho V^{2} S a \Delta \alpha
\end{equation}
ローターブレードの相対速度の差によってローター回転面内に揚力の不均衡が生じ,結果としてローター回転面が後傾することになる
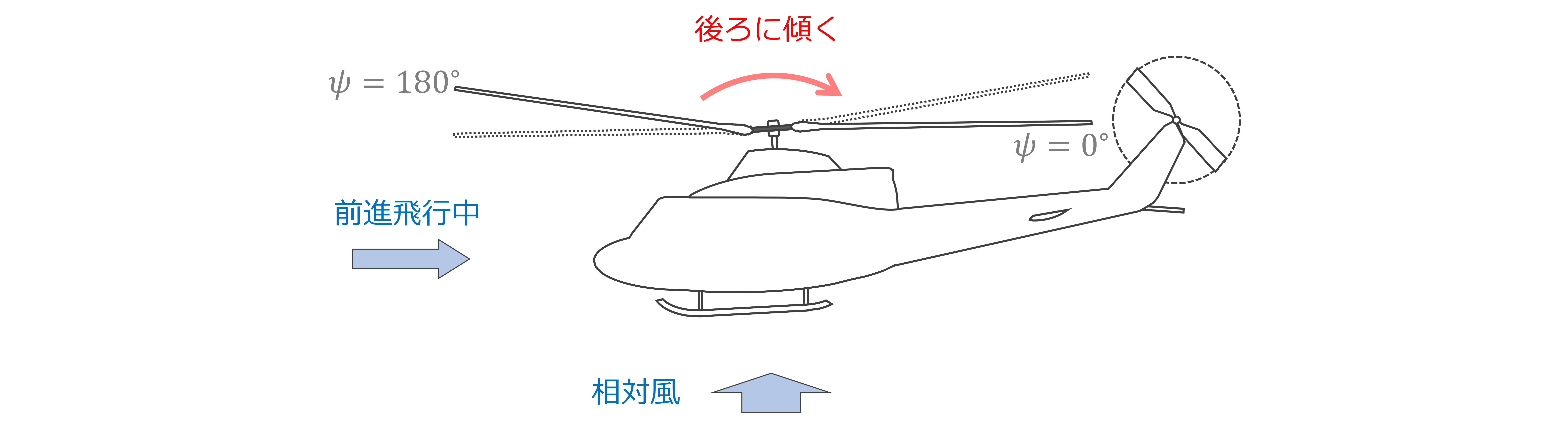
このローター回転面の後傾は,前進速度(前進側ブレードと後退側ブレードの相対速度の差)に比例して大きくなる
角速度
メインローターの回転軸に垂直な方向に角速度が加わると,それを妨げる向きにローター回転面が傾く
「回転する物体の回転軸が傾けられると,物体の回転方向に90度遅れた方向に回転軸を傾けるような慣性力がはたらく」というジャイロ効果とよばれる現象がある
ローターに角速度が加わると,ジャイロ効果によりローター回転面内に力の不均衡が生じる
ローターが回転しているとき,ローターブレードの速度ベクトルは以下のようになっている
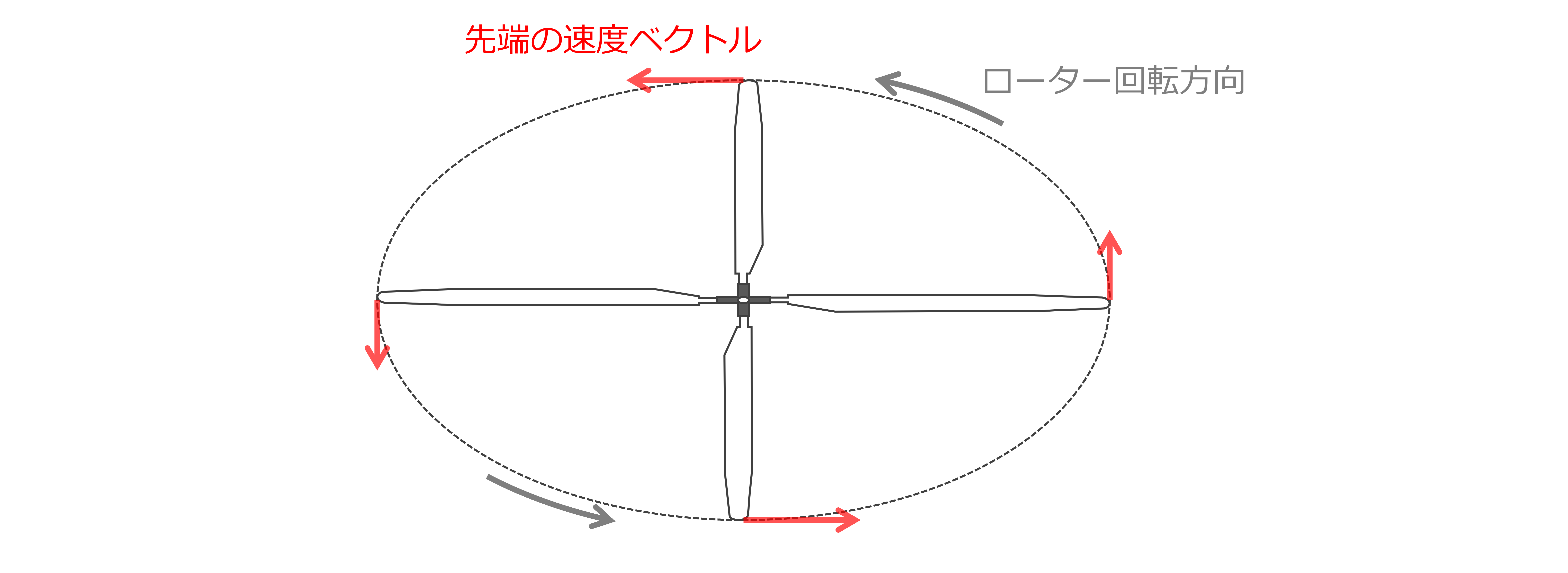
このようなローターが例えば頭上げのピッチング運動を行うと,機首側およびテール側のブレードの速度ベクトルは平行に移動するだけだが,前進側のブレードの速度ベクトルは上向きに,後退側のブレードの速度ベクトルは下向きに偏向させられる
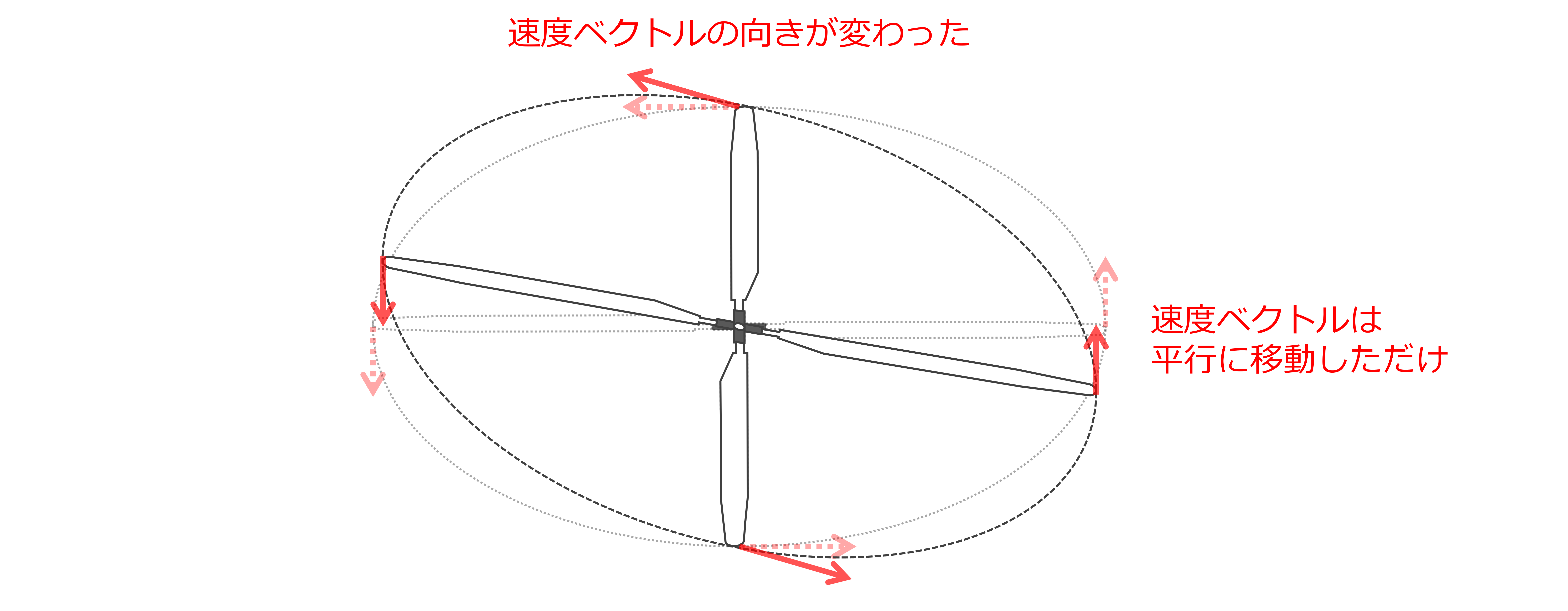
ローターブレードは慣性の法則によってその運動の方向を維持しようとするので,前進側のブレードには下向きの,後退側のブレードには上向きの慣性力が作用する
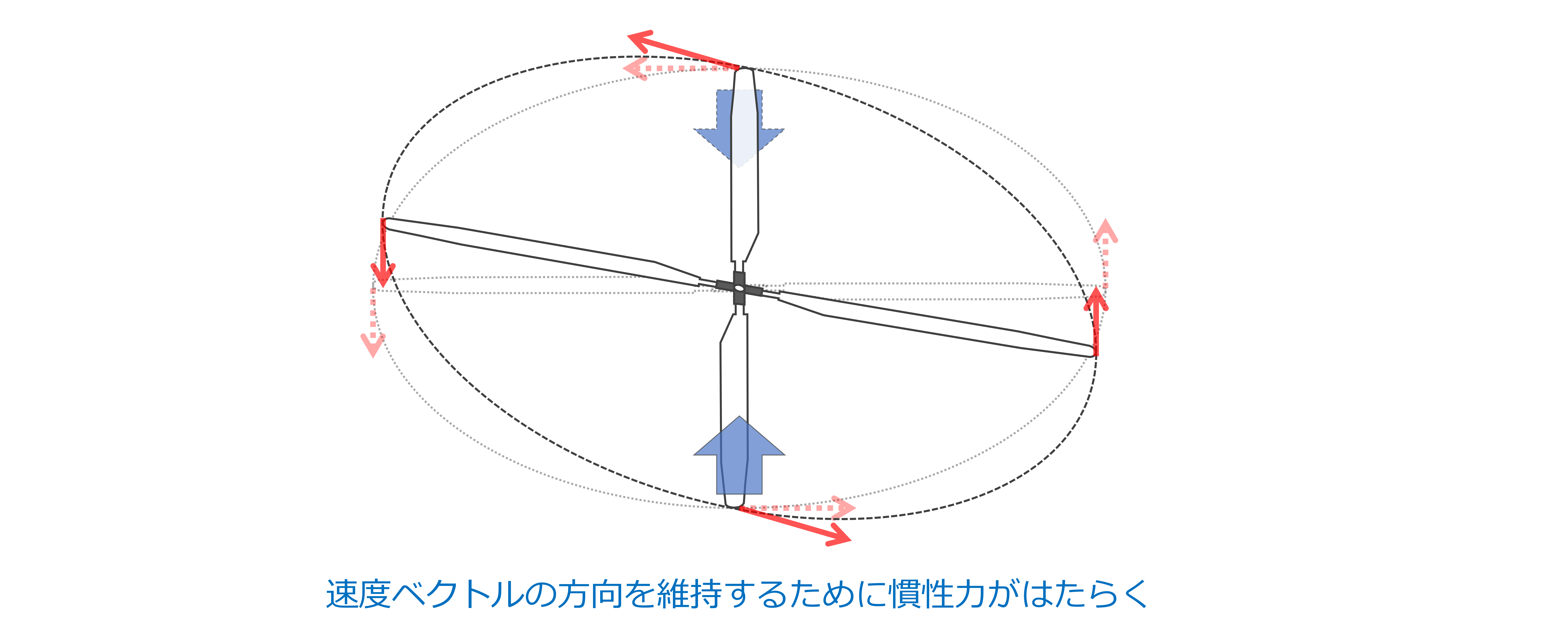
このように,ジャイロ効果によってローター回転面内にはピッチング運動の向きから90度遅れた方向に力の不均衡が生じる
それに加えて,ヘリコプターのローターは「回転面内に力の不均衡が生じると回転方向に90度遅れた方向に回転面が傾く」という性質を持っている
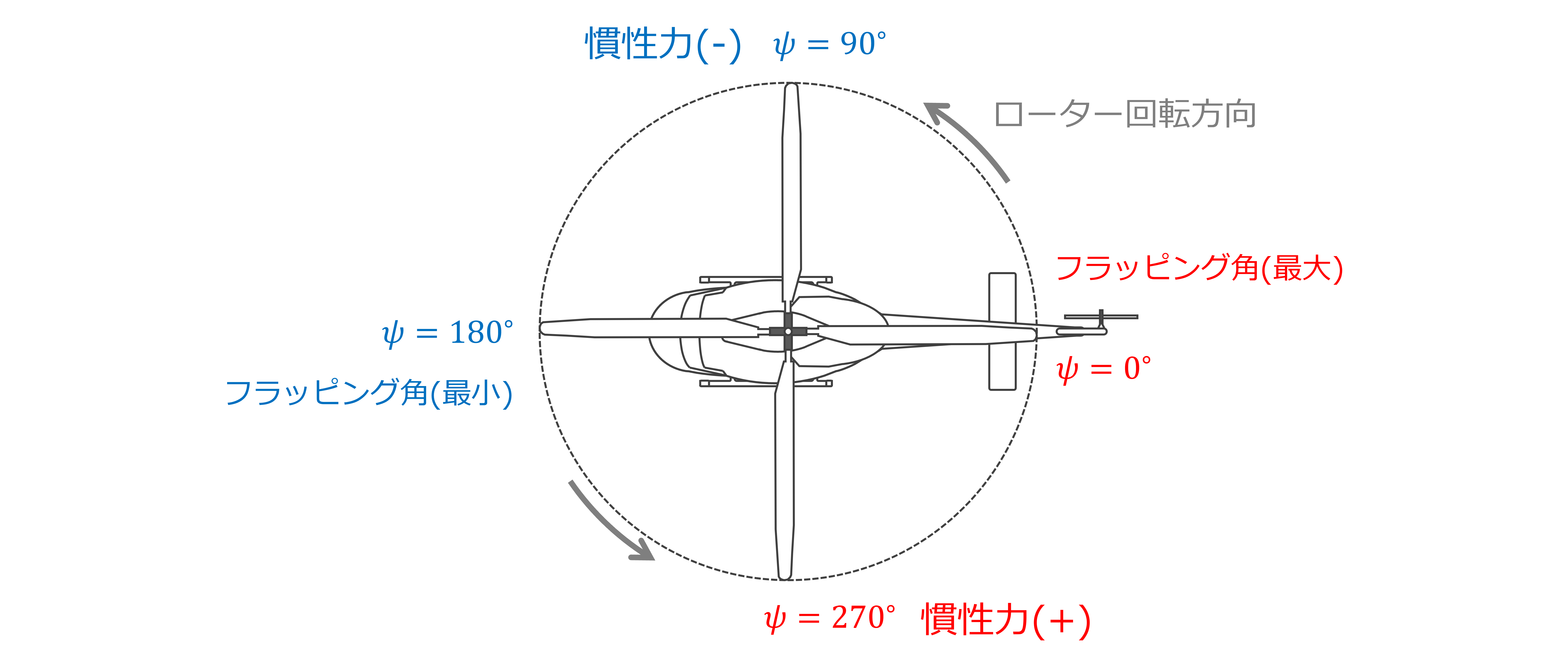
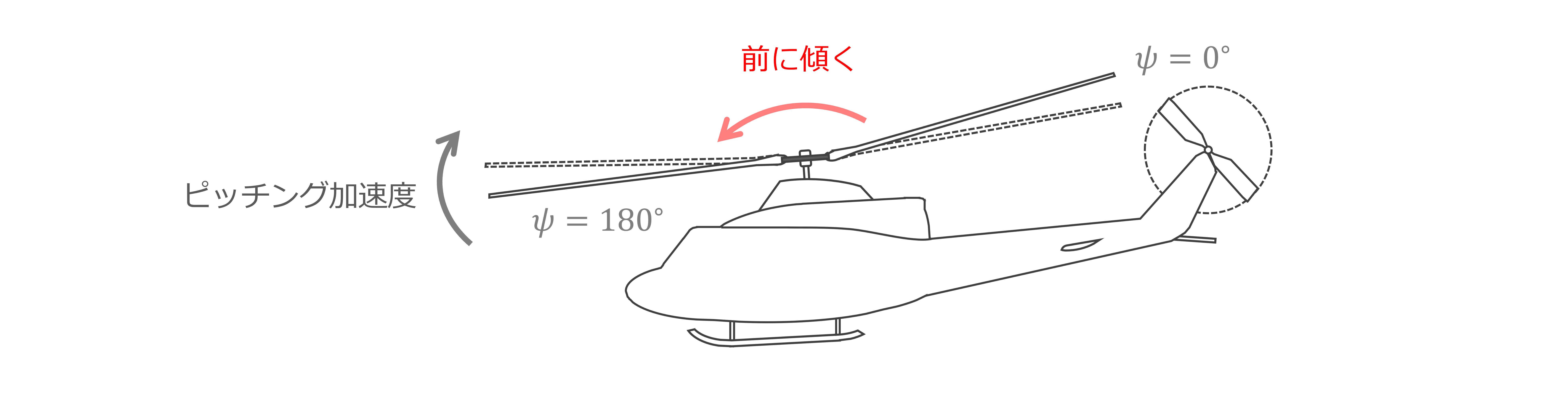
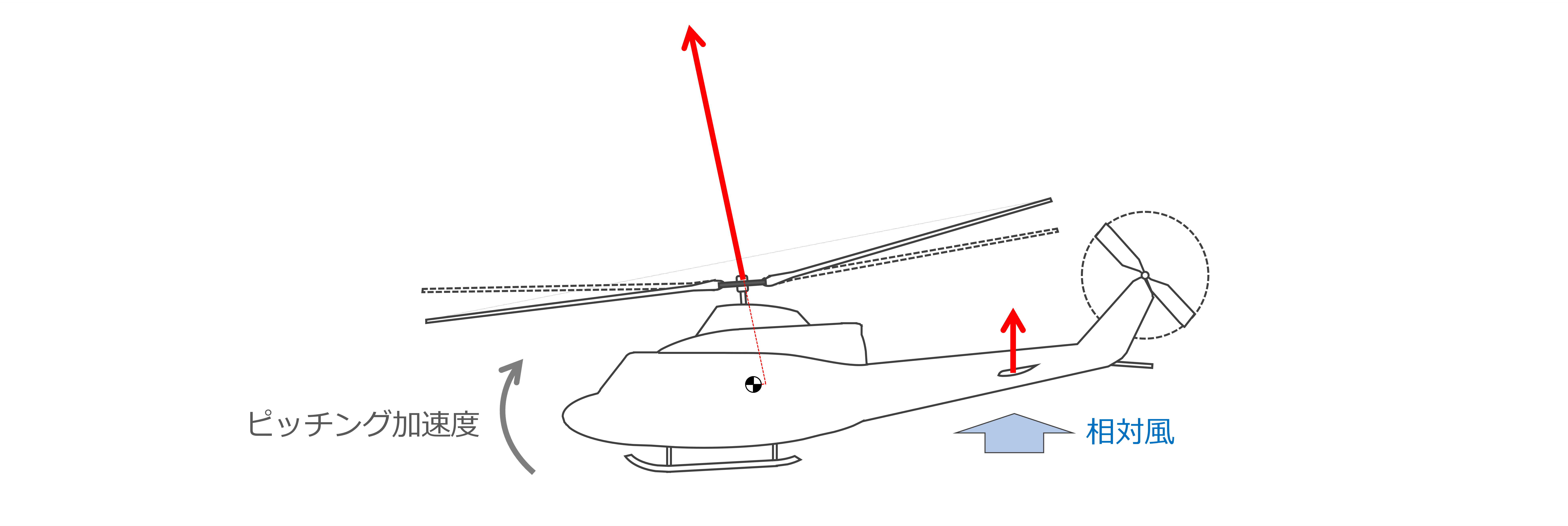
結果として,ローターに頭上げのピッチング加速度が生じると,ローター回転面は前傾し,ピッチング運動を抑えるはたらきをすることになる
ローターブレードのフラッピング運動は非常に複雑な運動である
ローターブレードが頭上げの回転運動を行うと,機首側のブレードは上からあたる風によって迎角が小さくなり,テール側のブレードは下からあたる風によって迎角が大きくなる
結果として,前後方向に揚力の不均衡が生じ,ローター回転面は左に傾くことになる
ローター回転面が左に傾くような回転を行うと,前進側のブレードの揚力が小さく,後退側の揚力が大きくなるので,今度はローター回転面が前に傾こうとする
ローターのフラッピング運動はこれらの二次的,三次的,・・・な作用がはたらくことで非常に複雑な運動になり,ブレードのフラッピング角\(\beta\)は次のように表されるようになる
\begin{equation}
\beta=a_{0}-a_{1}\cos{\psi}-b_{1}\sin{\psi}-a_{2}\cos{2\psi}-b_{2}\sin{2\psi}-\cdots
\end{equation}
フラッピング角\(\beta\)には上記のような高次項が存在するが,空力計算の際には無視しても大きな影響はない
メインローター単体の特性は以下の通り
- 水平方向の速度が増加すると,回転面は速度に対して後傾する
- 迎角が増加すると,回転面は前進速度に対して後傾する
- 角速度がはたらくと,回転面はそれを妨げる方向に傾く
ヘリコプターの安定性
以上のことを踏まえてヘリコプターの各種特性を説明する
速度安定
速度が増加するとメインローターが後傾して後ろ向きの力が発生して減速するので速度安定は正

\(M_{u}\):速度変化から生じるピッチングモーメント
速度が増加するとメインローターが後傾して頭上げのピッチングモーメントが生じる
迎角安定
迎角が増加するとメインローターが後傾して頭上げのモーメントが発生すると同時に,水平安定板の揚力が増加して頭下げのモーメントが発生する
低速度域ではメインローターのピッチングモーメントの方が大きく頭上げになるので迎角安定は負
高速度域では水平安定板のピッチングモーメントの方が大きく頭下げになるので迎角安定は正
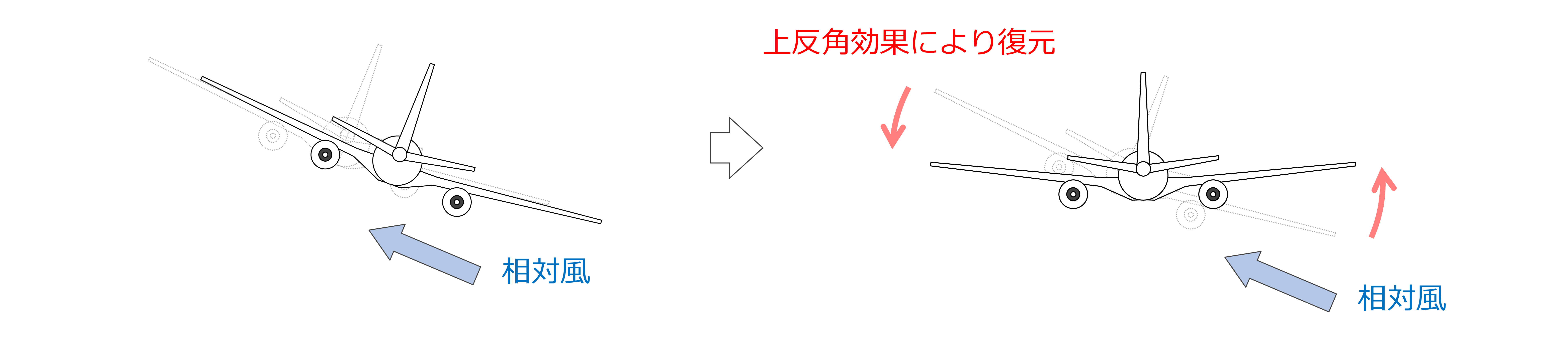
横安定
機体が右バンクをして横滑りすると,滑りに対して反対方向にメインローターが傾いて左ロールのモーメントが生じるので横安定は正
固定翼機の上反角効果と同じ効果がある
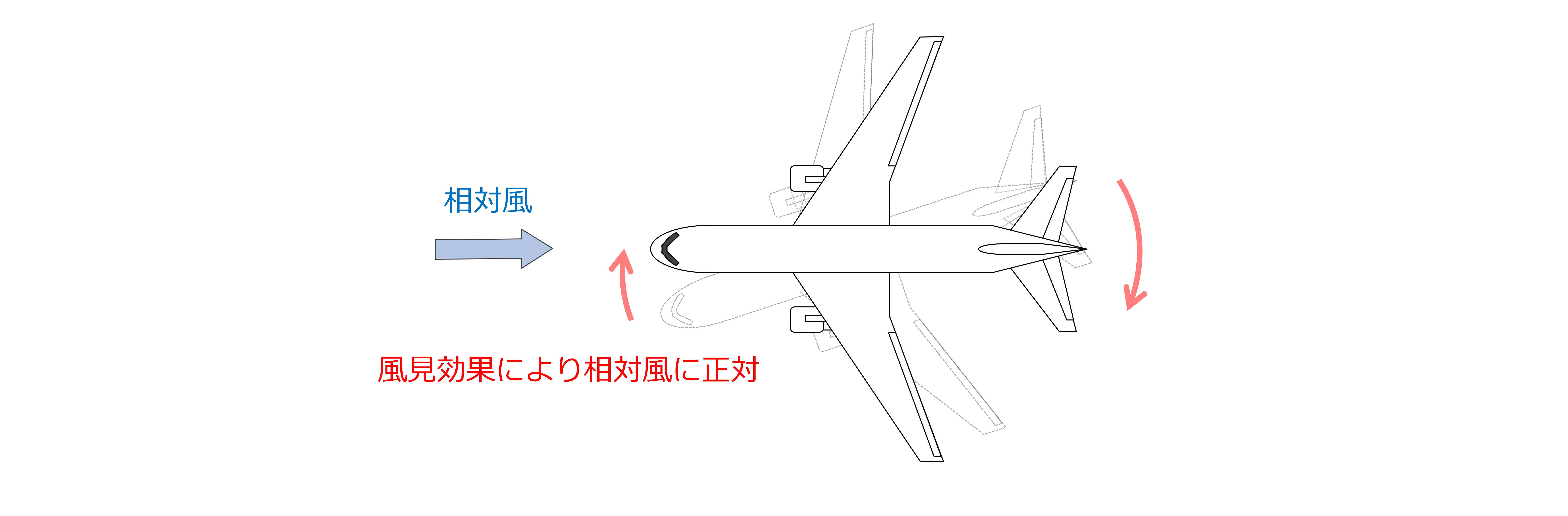
方向安定
機体が右に横滑りすると,テールローターの迎角が減少して推力が小さくなると同時に垂直安定板が左方向に揚力を発生させ,機首を右に向けるヨーイングモーメントが生じるので方向安定は正
固定翼機の風見効果と同じ効果がある
ピッチ減衰
機体が頭上げのピッチング運動をすると,ジャイロ効果によりメインローターが前傾すると同時に,水平安定板に上向きの揚力が生じて頭下げのピッチングモーメントが発生するのでピッチ減衰は正
ロール減衰
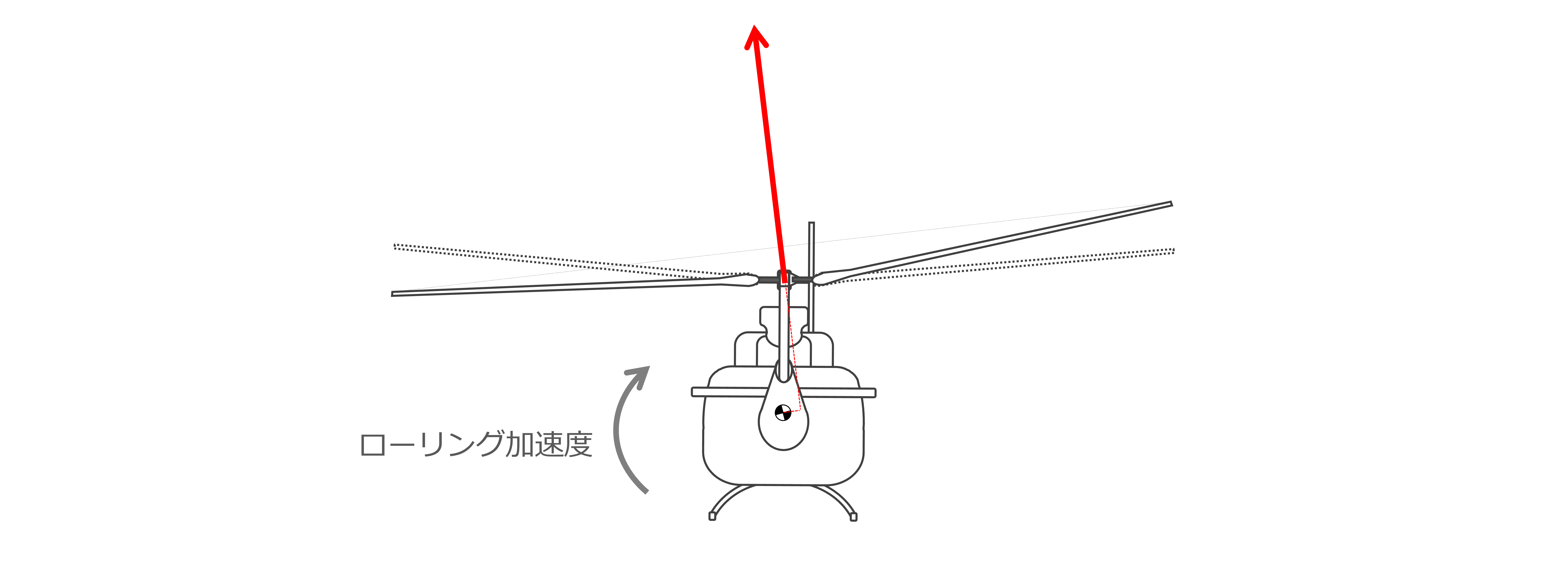
機体がローリング運動をすると,ジャイロ効果によりメインローターが反対方向に傾いてローリングを妨げる方向のモーメントを生じるのでロール減衰は正
ヨー減衰
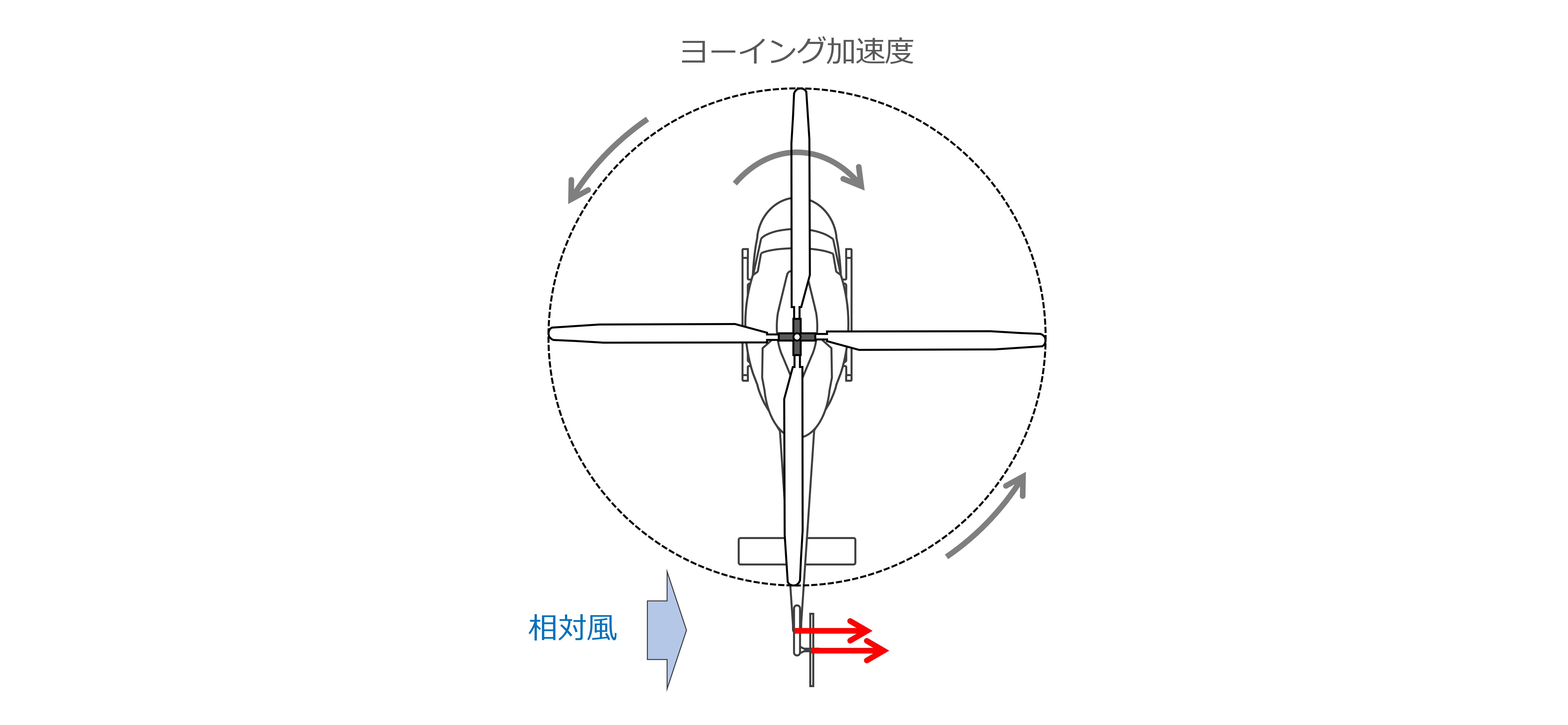
機体が機首を右に向けるヨーイング運動をすると,テールローターの迎角が増加して推力が大きくなると同時に垂直安定板が右方向に揚力を発生させ,機首を左に向けるヨーイングモーメントが生じるのでヨー減衰は正
ホバリング時の不安定モード
ヘリコプターのホバリング飛行は動的に不安定である
この不安定モードは速度安定\(X_{u}\)と速度-ピッチ連成\(M_{u}\)によって引き起こされ,徐々に振幅が大きくなっていく発散振動である
原理は以下の通り
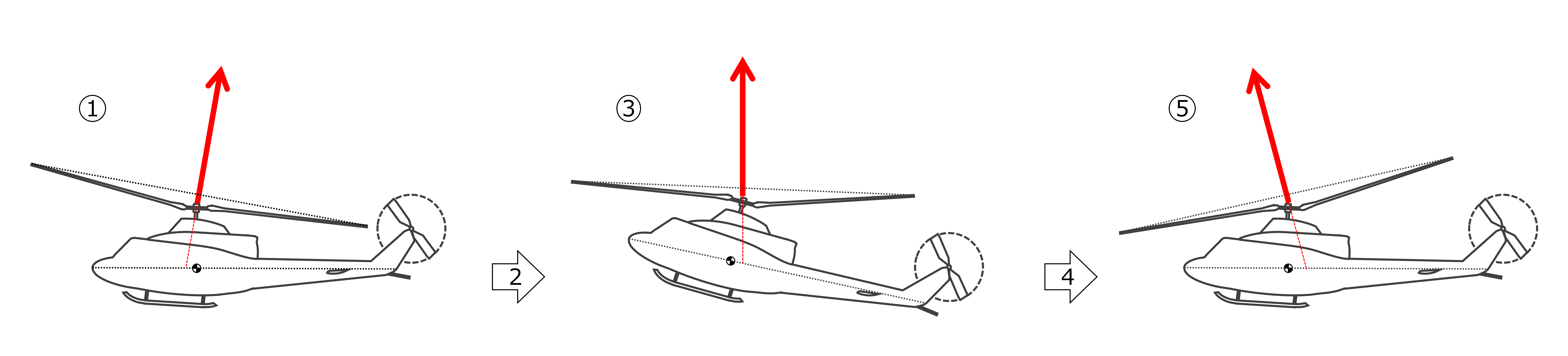
- ホバリング状態から何らかの外乱によってメインローターが後傾すると,後進速度と頭上げ運動が同時に発生する
- 後傾したローター推力によって後進速度が大きくなっていくと同時に,後進速度によってローターは徐々に前傾する
- ローター回転面が水平に戻ったときにはまだ後進速度は残っている.機体は頭上げ姿勢であり,ローター推力によって頭下げのモーメントがはたらく
- 後進速度によってローターがさらに前傾し,後進速度が次第にゼロになっていくと同時に頭下げモーメントによって機体は水平に戻っていく
- 後進速度がゼロになって機体が水平に戻ったとき,ローターは前傾しているため,今度は前進運動と頭下げ運動が同時に発生する(前傾の角度は最初の後傾よりもやや大きい)
- 前傾したローター推力によって前進速度が大きくなっていくと同時に,前進速度によってローターは徐々に後傾する
- ローター回転面が水平に戻ったときにはまだ前進速度は残っている.機体は頭下げ姿勢であり,ローター推力によって頭上げのモーメントがはたらく
- 前進速度によってローターがさらに後傾し,前進速度は次第にゼロになっていくと同時に頭上げモーメントによって機体は水平に戻っていく
- 前進速度がゼロになって機体が水平に戻ったとき,ローターはさらに大きく後傾しているため,①に戻って振動は発散していく
今回は前後の運動で説明したが,この不安定モードは左右の運動でも同様に起きる
ヘリコプターのホバリング飛行に高度な技術が必要な理由の一つである
- ヘリコプターの安定性は基本的に固定翼機と同じだが,低速度域で迎角不安定であり,速度変化によって機体重心周りにモーメントが発生する
- 上反角効果や風見効果と同じような特性があるため,スパイラルモードやダッチロールモードが存在する
- ホバリング飛行は動的不安定なため,機体の運動は徐々に発散していく
おわりに
ヘリコプターの力のつり合い,操縦,安定性についての概要を説明した
- ヘリコプターはメインローター推力,重力,抗力,テールローター推力,エンジントルクをつりあわせてトリム飛行を行っている
- サイクリックスティックでメインローター推力の向き,コレクティブピッチレバーでメインローター推力の大きさ,ラダーペダルでテールローター推力を操作することで飛行している
- ヘリコプターの安定性は概ね固定翼機と同じだが,低速度域の飛行は不安定である
次回はヘリコプターの要であるローターのモーメント理論およびヘリコプターの基本特性について説明する
(準備中)
↓おすすめ記事

コメント
最近ドローンを用いた空撮などに関心があり、航空機における飛行時の力学についての調べていたらこちらの記事を見つけ、内容拝見させていただきました。
今後安定性・操縦性についての記事も書かれるとのことですので、楽しみにお待ちしています。