
ヘリコプターの構造についての概要を説明する
はじめに
ヘリコプターの飛行力学入門シリーズでは,ヘリコプターを初めて学ぶところから,フライトシミュレーターの作成やヘリコプターの基本設計を行うところまでに必要な知識について説明していく
この記事では,ヘリコプターの飛行力学を理解できるようになるために最初に理解しておくべきヘリコプターの構造の概要について説明する
↓今回の記事の参考文献
- ヘリコプターを構成する5つの部品とその役割
それではいってみよう
ヘリコプタの構造
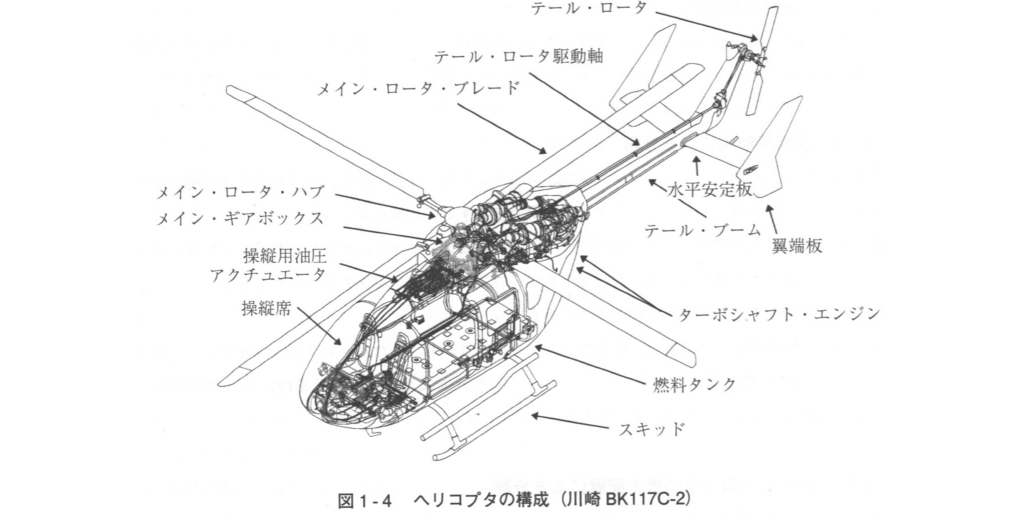
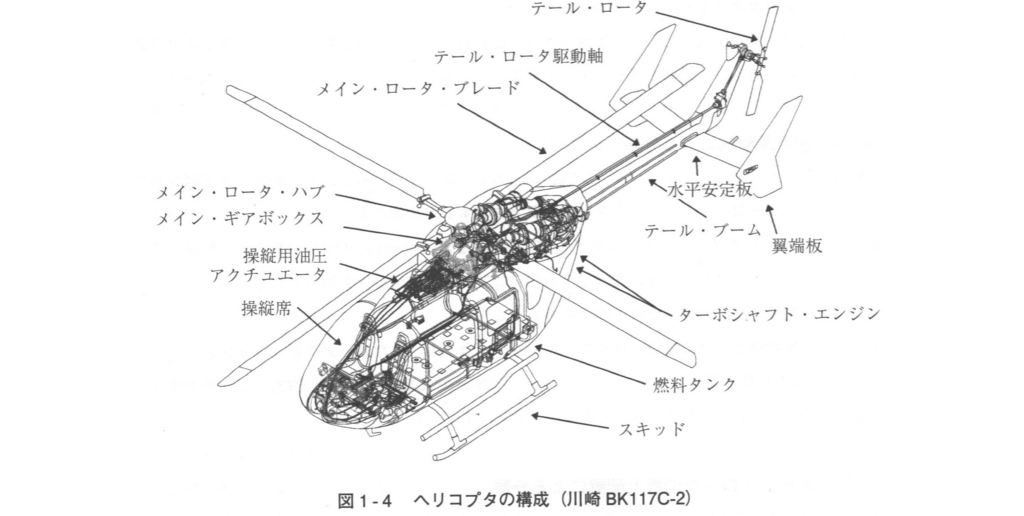
ヘリコプターの各部名称とその部品の役割をざっくりと説明する
飛行力学的には,ヘリコプターは次の5つの部品によって構成されている
- メインローター
- テールローター
- 水平安定板
- 垂直安定板(翼端版)
- 胴体
それぞれの大まかな役割は以下の通り
| メインローター | テールローター | 水平安定板 | 垂直安定板 | 胴体 | |
| 推力 | 〇 | ||||
| 上昇/下降 | 〇 | ||||
| 前後の移動 | 〇 | ||||
| 左右の移動 | 〇 | 〇 | |||
| 縦の操縦(ピッチ) | 〇 | ||||
| 横の操縦(ロール) | 〇 | ||||
| 方向の操縦(ヨー) | 〇 | ||||
| 迎角安定 | ×(※1) | 〇(※2) | |||
| 速度安定 | 〇 | ||||
| ロール安定(上反角効果) | 〇 | ||||
| 方向安定(風見効果) | 〇 | 〇(※2) | |||
| ペイロード | 〇 |
※2 前進飛行時のみ
1つずつ説明していく
※ここでは図と文章を用いた説明にとどめ,次回以降の記事であらためて数式を使ってどっぷりと解説する
メインローター
ヘリコプターの上部についているでっかいローターで,ヘリコプターにおいてダントツで重要な部品
メインローター以外の部品はメインローターができないことを補うためについている
機体を持ち上げる推力を発生させ,上昇/下降,前後左右への移動,ピッチアップ/ダウン,左右へのロール,加速/減速を行うだけでなく,速度安定や上反角安定も担っている
※ただし,迎角安定は負
固定翼機でいうところの主翼・エンジン・水平尾翼が持つ役割をメインローターが1つで代替しており,もはやヘリコプター≒メインローターといっても差し支えない
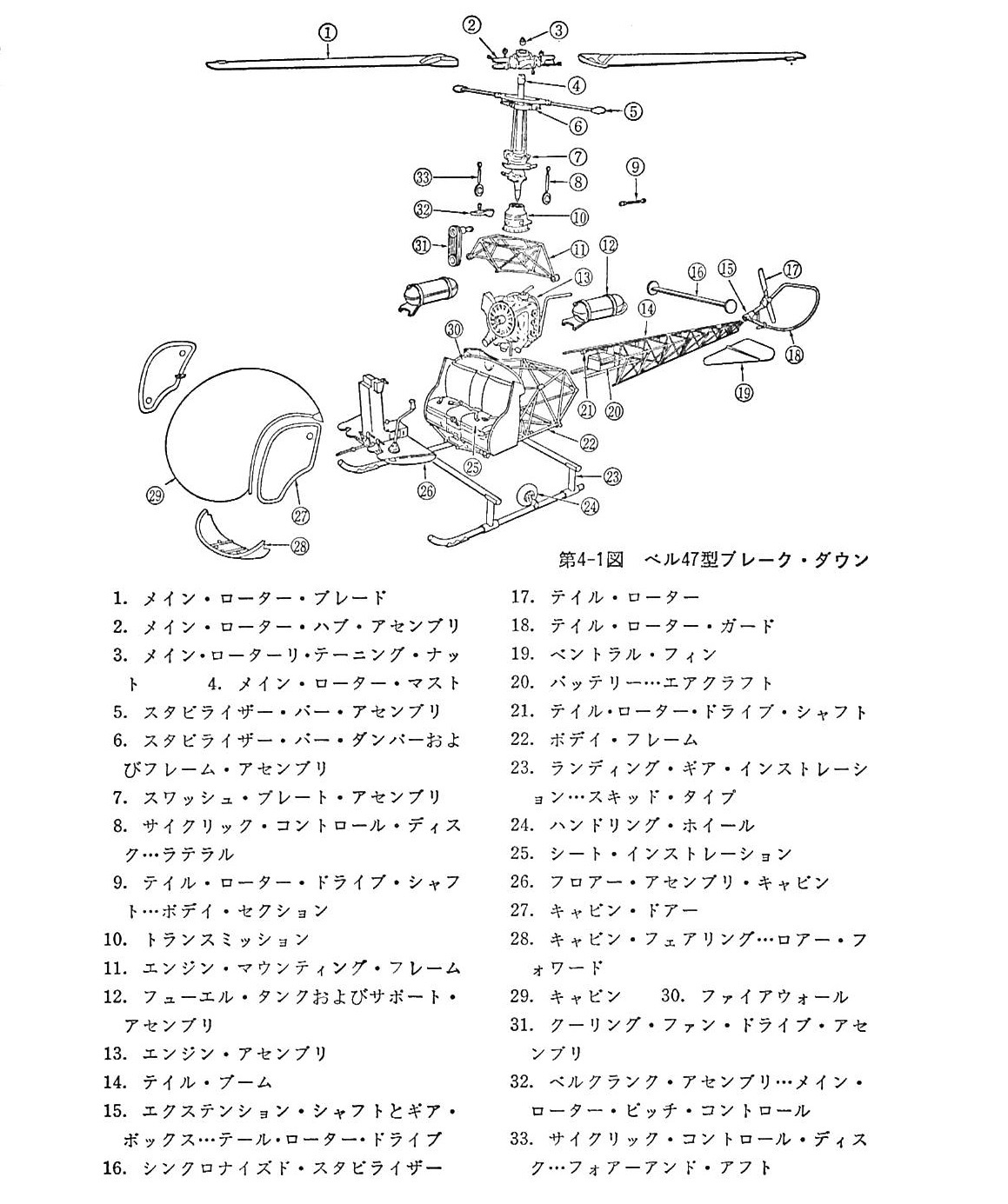
メインローターは,さらに次の5つの部品で構成されている
- ローターブレード
- ヒンジ
- ハブ
- シャフト
- スワッシュプレート
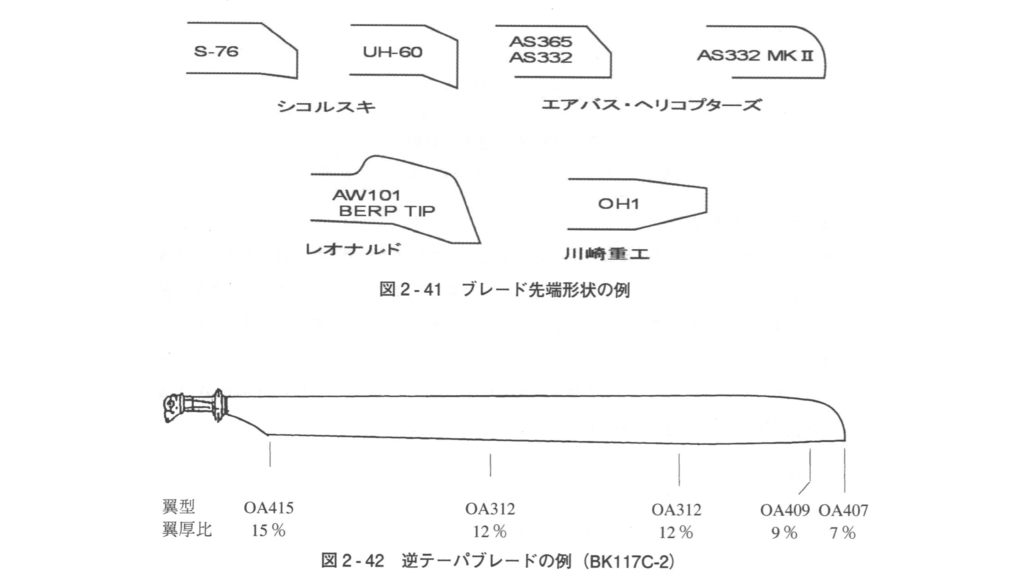
ローターブレード
メインローターについている翼で,回転することによって揚力を発生させる
メインローターの推力調整はブレードのピッチ角操作によって行われる(ローターの回転数は一定)
ヒンジを介してローターハブに接続されている
ローターの回転方向はアメリカとヨーロッパで反対方向
今回の一連の記事では,ローターの回転方向はローターを真上から見て反時計回り(アメリカ式)とする
※参考文献のうち「図解ヘリコプタ入門」のみローター回転方向が上から見て時計回り(ヨーロッパ式)なので注意
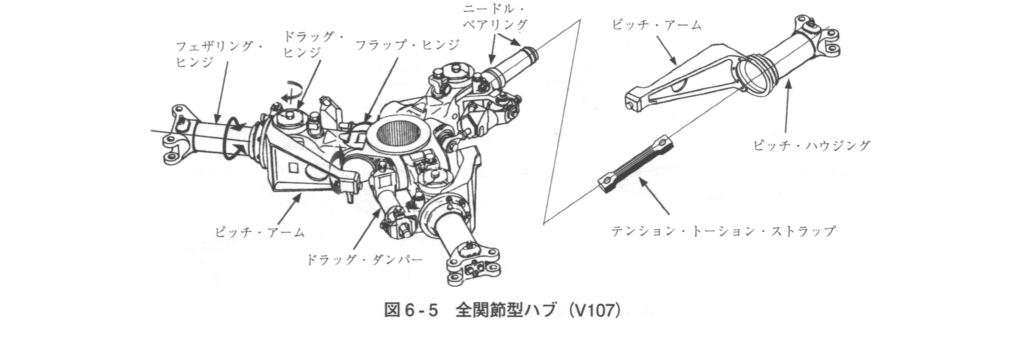
ヒンジ
ローターブレードとローターハブを接続している部品
直行する3つの軸についてヒンジが設けられていて,それぞれフラッピングヒンジ(上下方向),ドラッグヒンジ(前後方向),フェザリングヒンジ(ピッチ方向)と呼ばれている
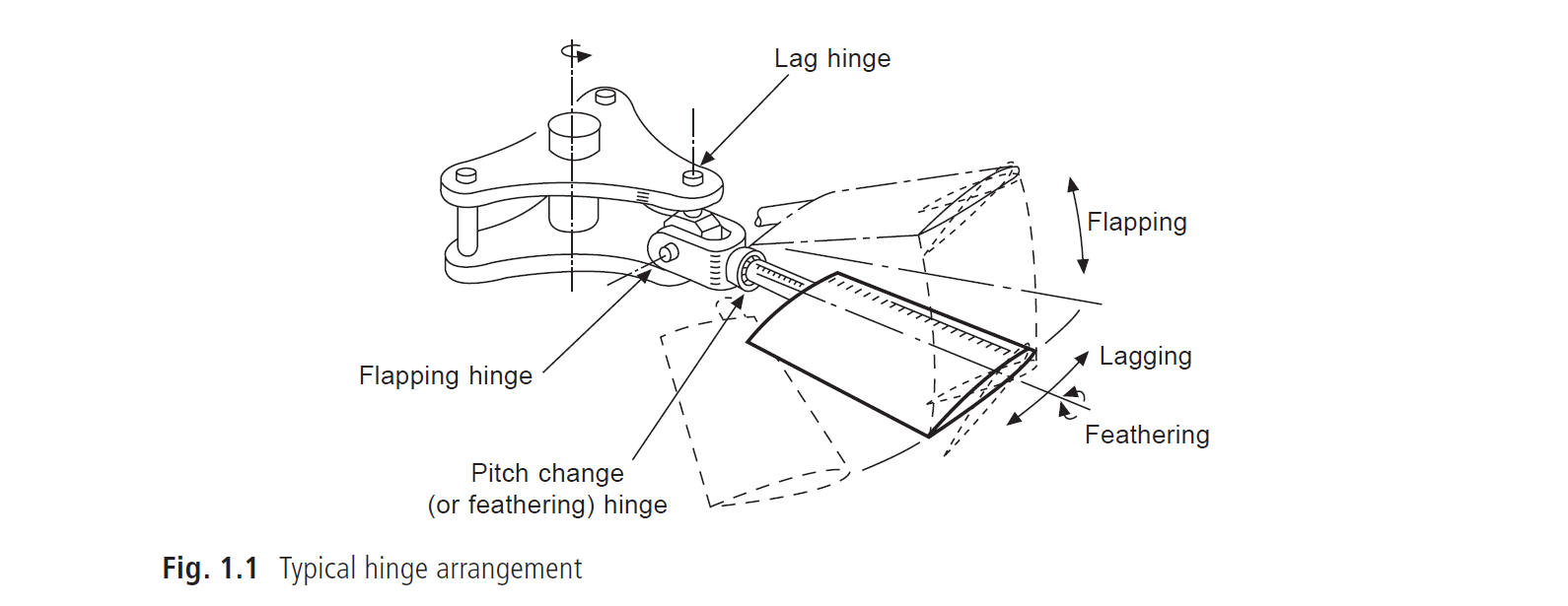
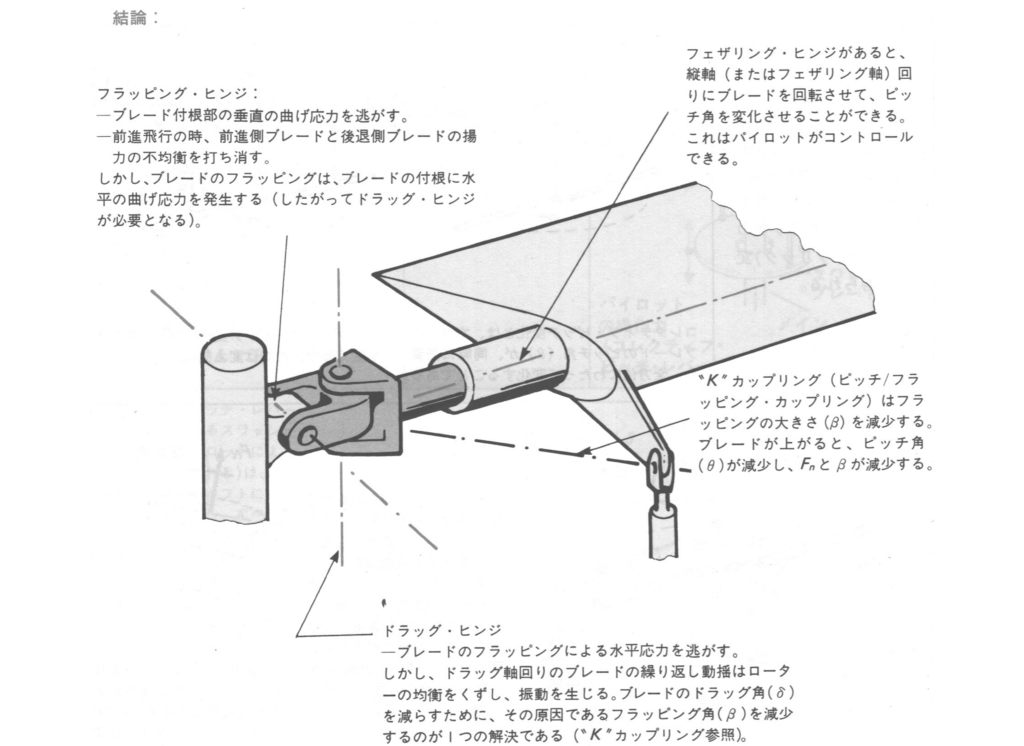
3つのヒンジが搭載されている順番は機体によって異なり,必ずしも上の図の順番でなくてもよい
ヒンジを取り付けることにより,ブレード付け根に発生する曲げモーメントを緩和できるだけでなく,後述するスワッシュプレートによってローターの回転面を任意の方向に傾けることができるようになった
ヘリコプターが大空を自由に飛ぶことができるきっかけになった技術革新である
上の図で示した「全関節型」と呼ばれる構造以外にも,「シーソー型」「無関節型(ヒンジレス型/ベアリングレス型)」などの亜種や進化系がある
どの型の構造にせよ,近似的に全関節型と等価なものとして考えることができる
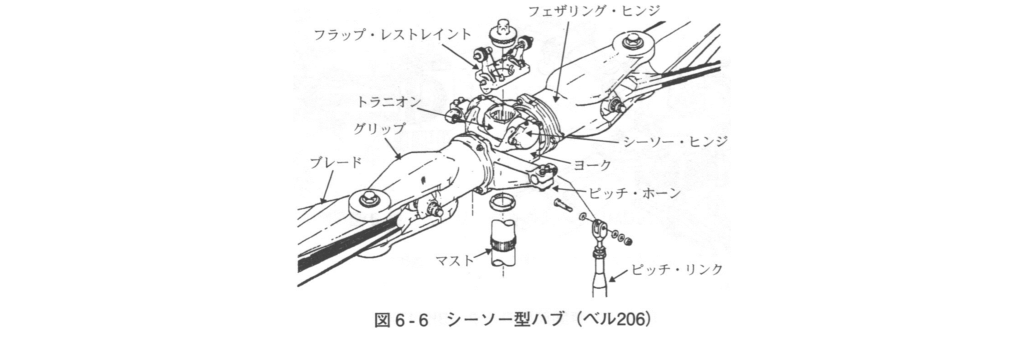
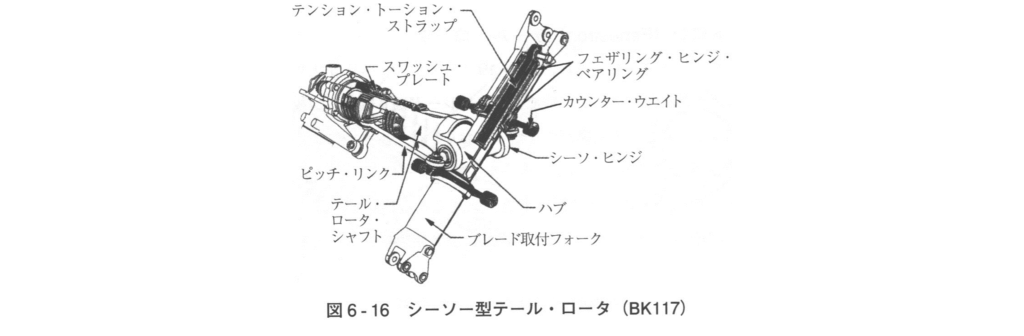
シーソー型ローター
ブレード枚数が2枚のローターでのみ採用される構造
全関節型ローターについている3つのヒンジからドラッグヒンジを取り除き,2枚のブレードを連結してシーソーのようにフラッピング運動をするようにしてある
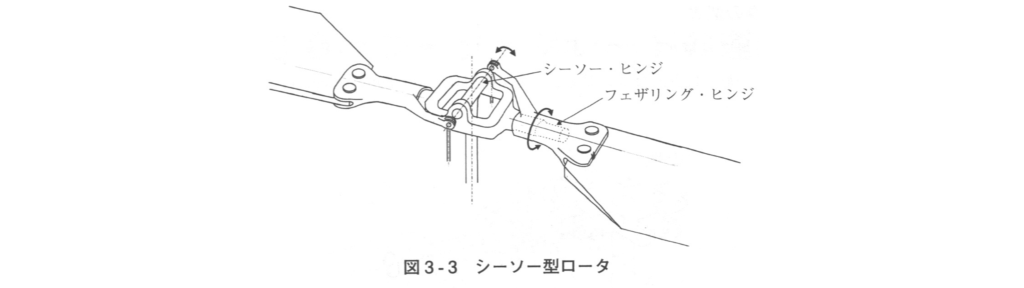
構造がシンプルになるというメリットから,小型ヘリコプターやRCヘリコプターに採用されている

2枚のブレードは,あらかじめ定常飛行時に想定されるフラッピング角の分だけ上に傾けて取り付けられている
シーソーヒンジとブレードの重心位置の高さを合わせることで,ブレードに働くコリオリ力を軽減している(これによりドラッグヒンジの省略が可能になる)
空力的には,「フラップヒンジオフセット(ローター回転軸からフラッピングヒンジまでの距離)がゼロである全関節型ローター」として扱うことができる
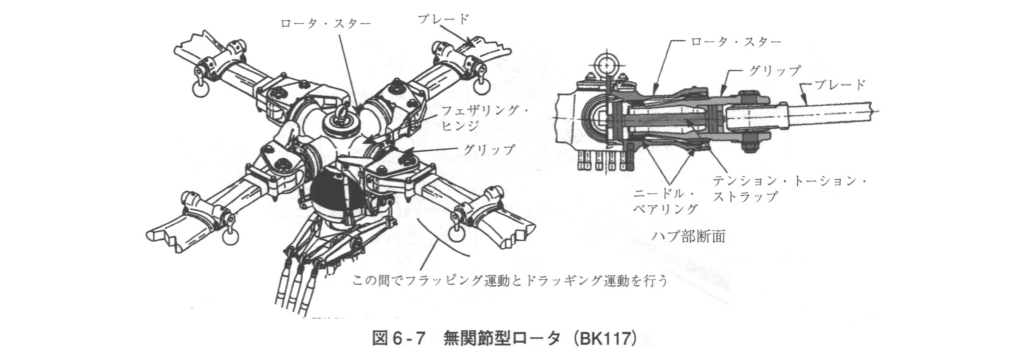
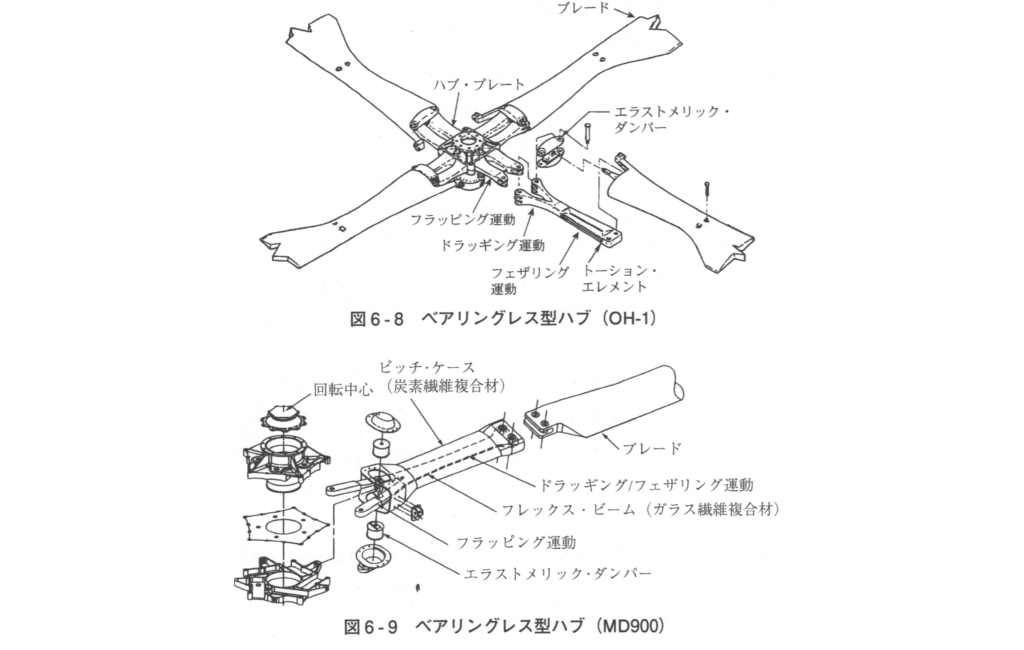
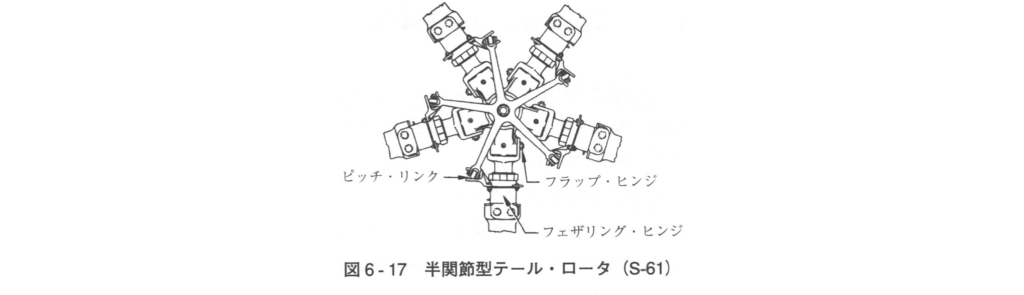
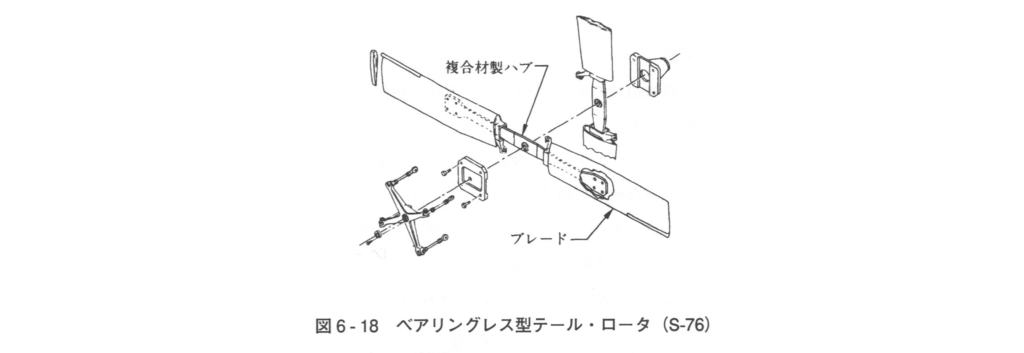
無関節型ローター
ブレードの根元の剛性をあえて小さくし,意図的な弾性変形によって機械的なヒンジを代替するローター
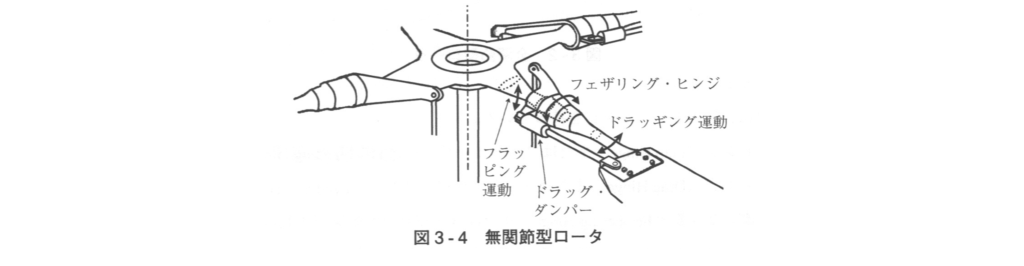
フラッピングヒンジとドラッグヒンジを弾性変形によって代替したものをヒンジレス型ローターという
さらに,フェザリングヒンジも弾性変形によって代替したものをベアリングレス型ローターという
ヒンジを減らすことで部品数が減り,構造が大幅にシンプルになる
どれも複合材の利用によって可能になった機構である
空力的には「フラッピングヒンジオフセットの大きな全関節型ローター」として扱うことができる

大きなフラップヒンジオフセットによって操縦性が大きく改善される
ちなみに,ドラッグヒンジはラグヒンジとも呼ばれる
次回以降の記事では,参考文献にあわせてラグヒンジと呼ぶことにする
ハブ
シャフトの上部に固定され,シャフトの回転をブレードに伝える部品
上述したヒンジの型に応じて,いろいろな構造がある
飛行力学的には,ハブの大きさ(フラップヒンジオフセットの大きさ)が操縦性(ハブモーメントの大きさ)に影響を与える
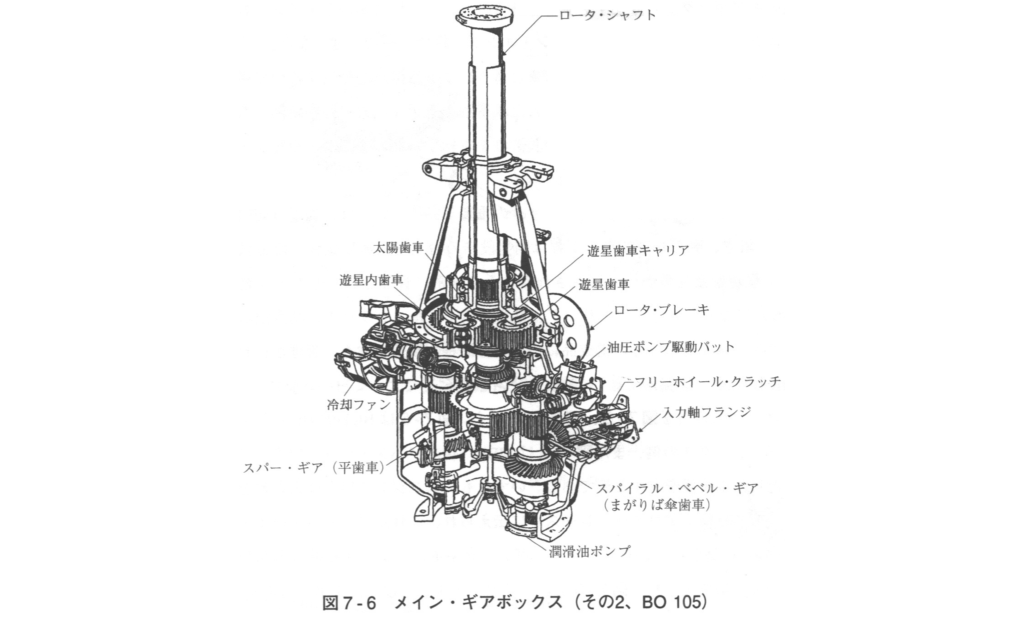
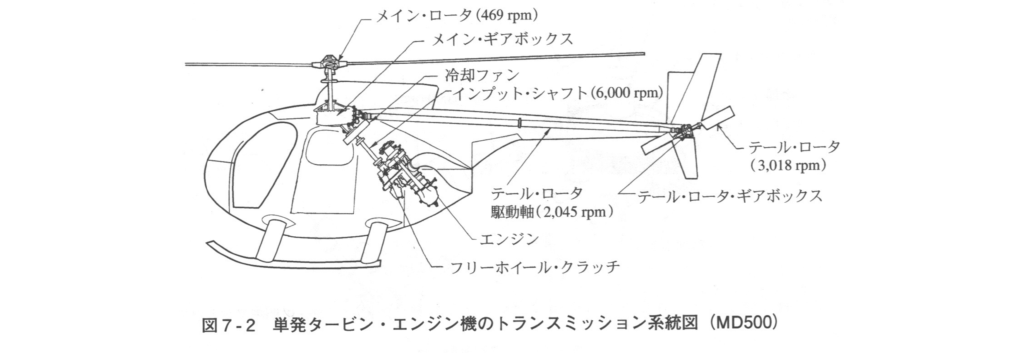
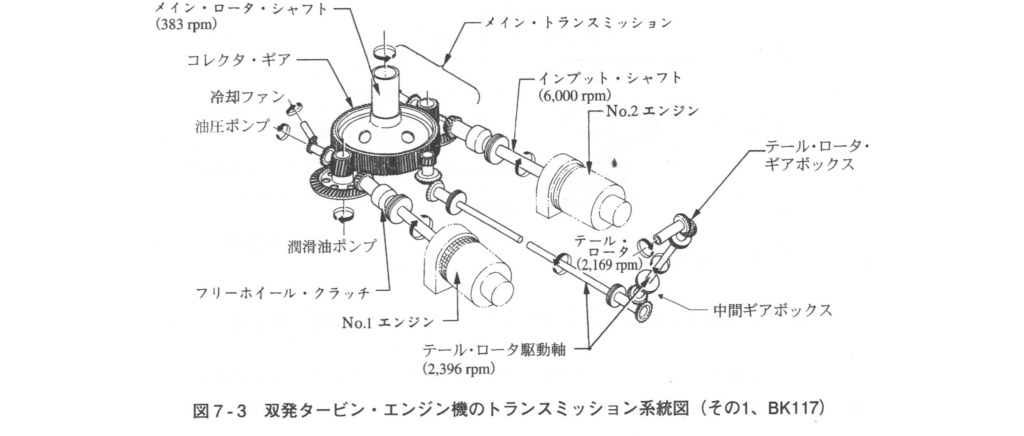
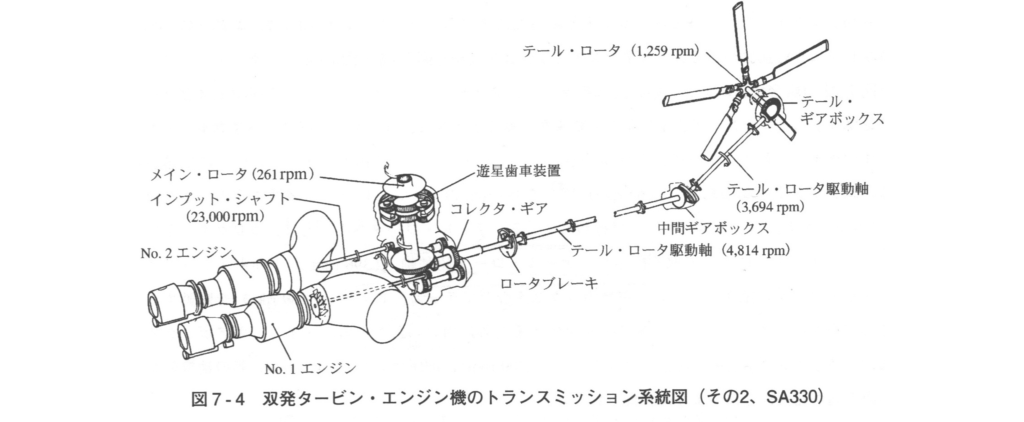
シャフト
トランスミッションで減速されたエンジンの回転をローターハブに伝達する部品
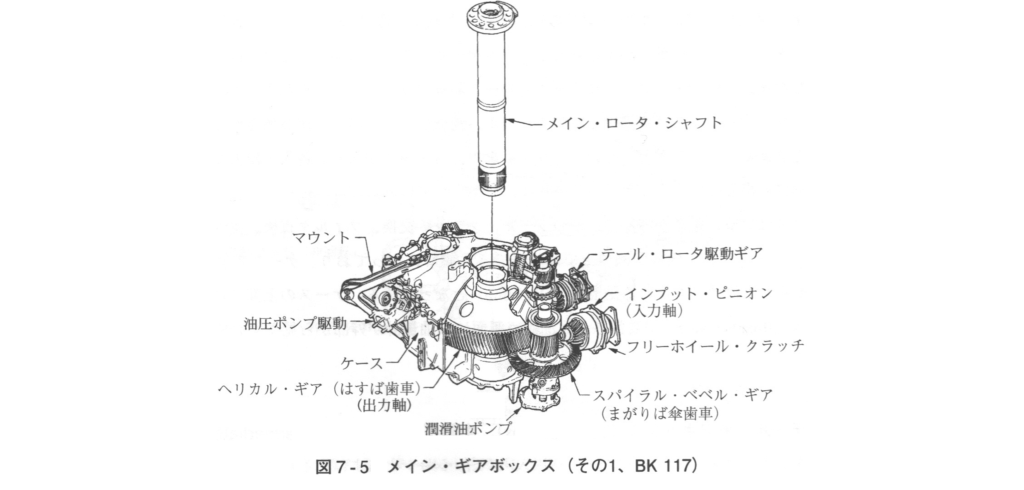
シャフトの回転軸は,ローターにはたらく力を考えるときの代表的な座標軸の1つである
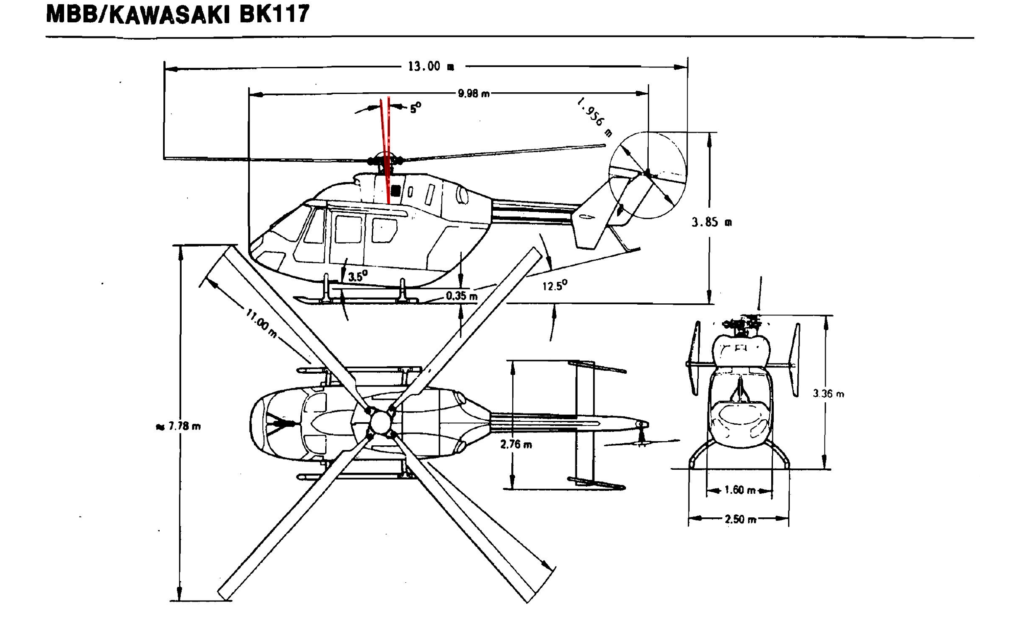
ローターシャフトの回転軸は胴体に対して少し前傾して取り付けられており,巡航中に胴体の角度がいい感じになるように設計されている
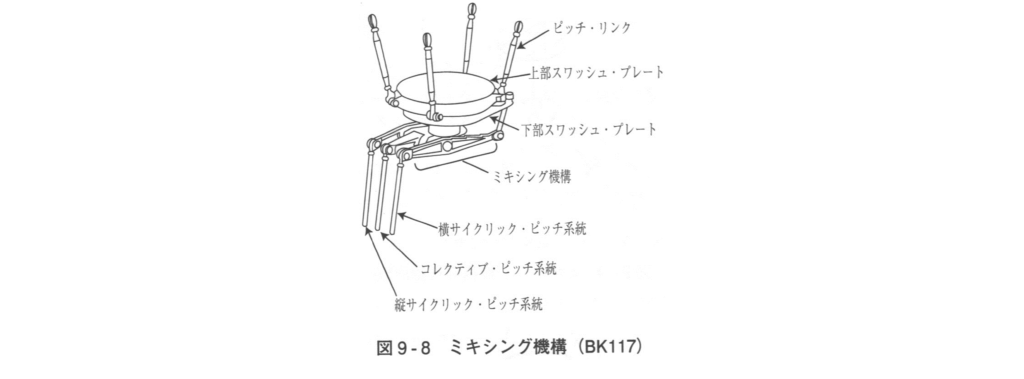
スワッシュプレート
メインローターシャフトに取り付けられ,ローターブレードの取り付け角を操作する部品
ヘリコプターが空を飛ぶことを可能にしている偉大な発明その2
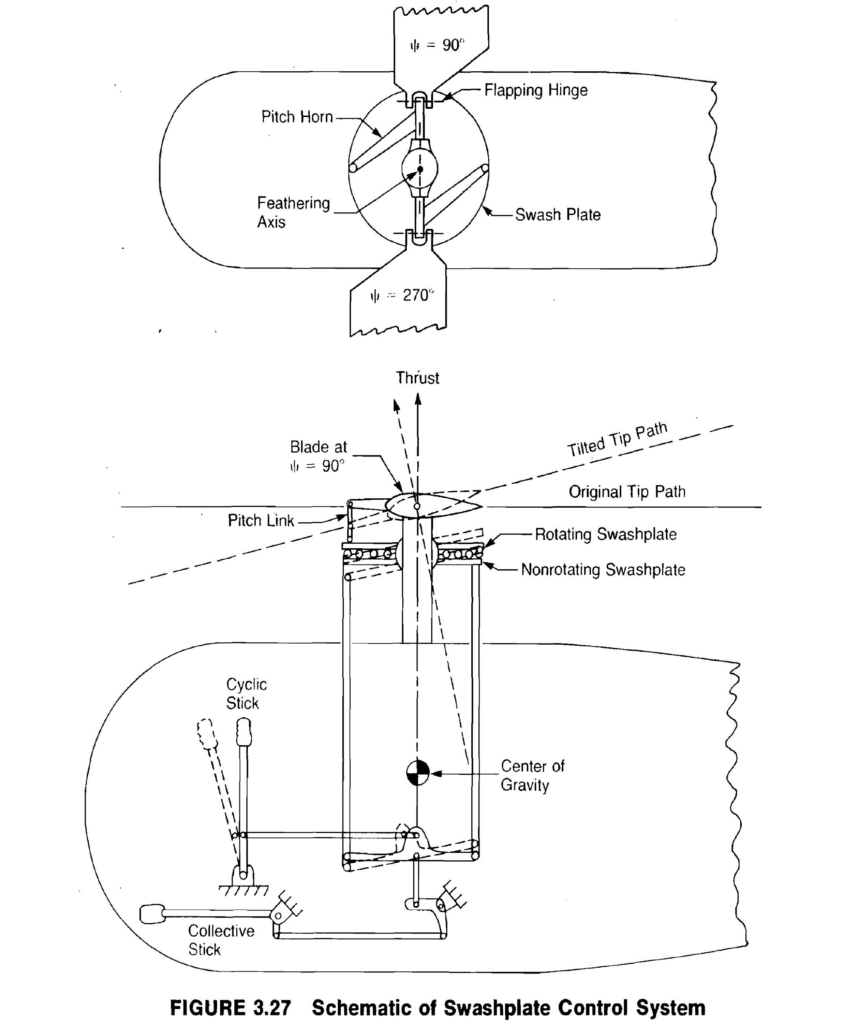
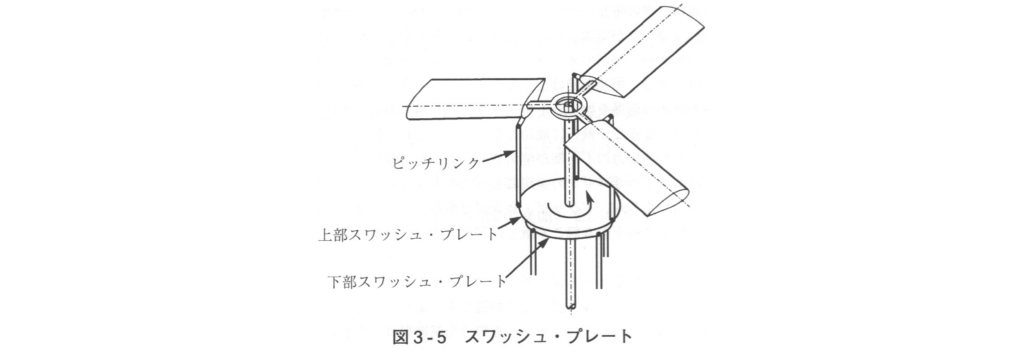
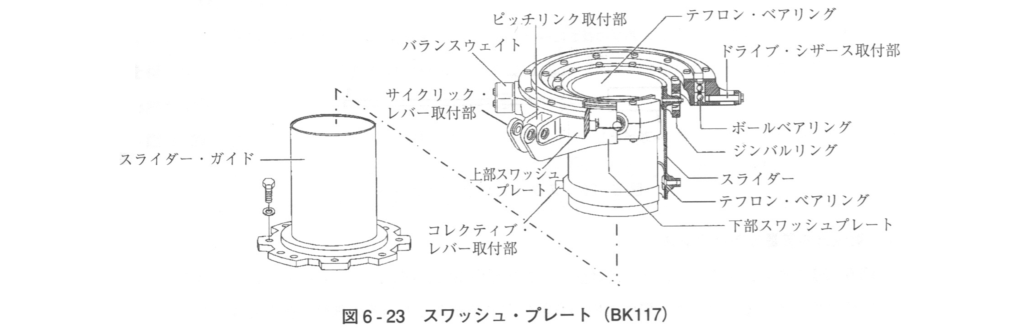
シャフトに沿って上下する非回転部と,各ブレードのフェザリングヒンジと接続されている回転部の2つで構成されている
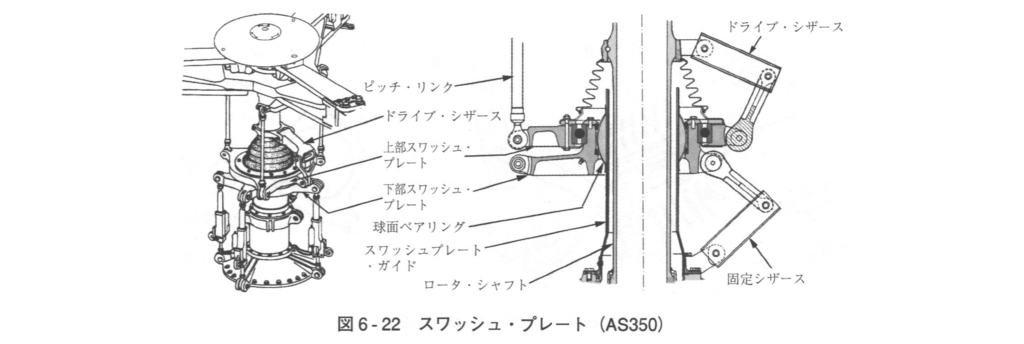
回転しない方のスワッシュプレートは,球面ベアリング(あるいはジンバルリングを用いたユニバーサルジョイント)によってシャフトに沿って上下するガイドに接続されている
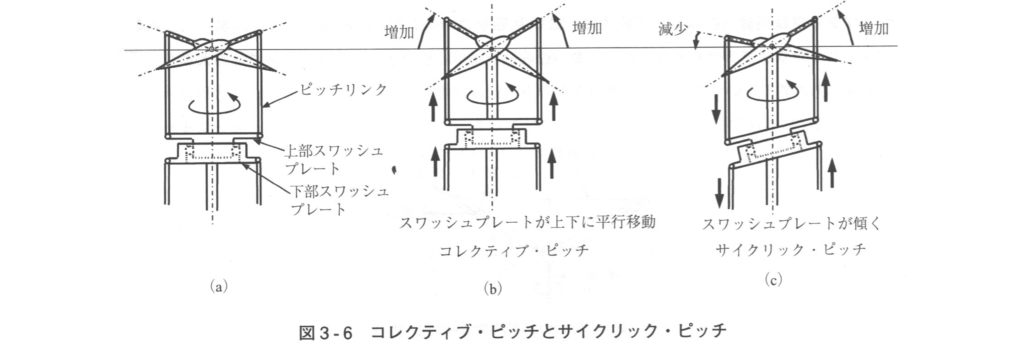
スワッシュプレートが上下すると,ブレードの取り付け角は一様に変化する(コレクティブピッチ)
コレクティブピッチ pic.twitter.com/AgciNvHWWe
— いーそー (@mtk_birdman) July 10, 2022
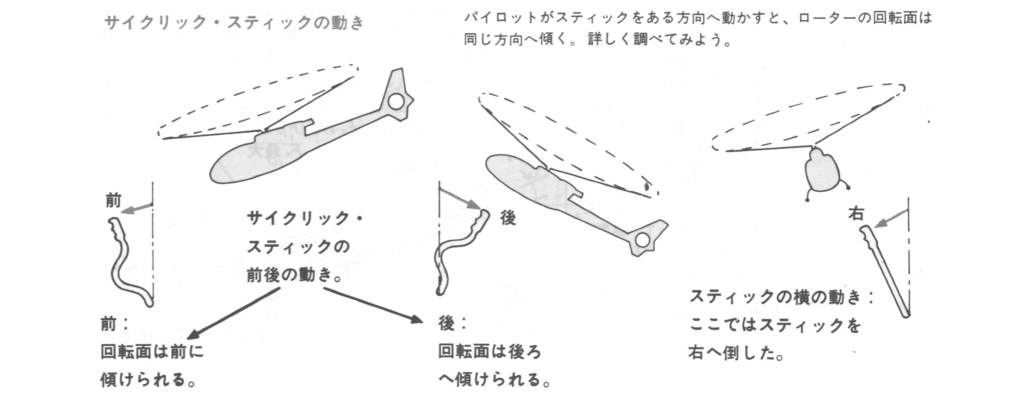
スワッシュプレートを傾けると,ブレードの取り付け角は周期的に変化する(サイクリックピッチ)
サイクリックピッチ (1/2) pic.twitter.com/4mcFB0FwnI
— いーそー (@mtk_birdman) July 10, 2022
サイクリックピッチ (2/2) pic.twitter.com/tfuf2uMASr
— いーそー (@mtk_birdman) July 10, 2022
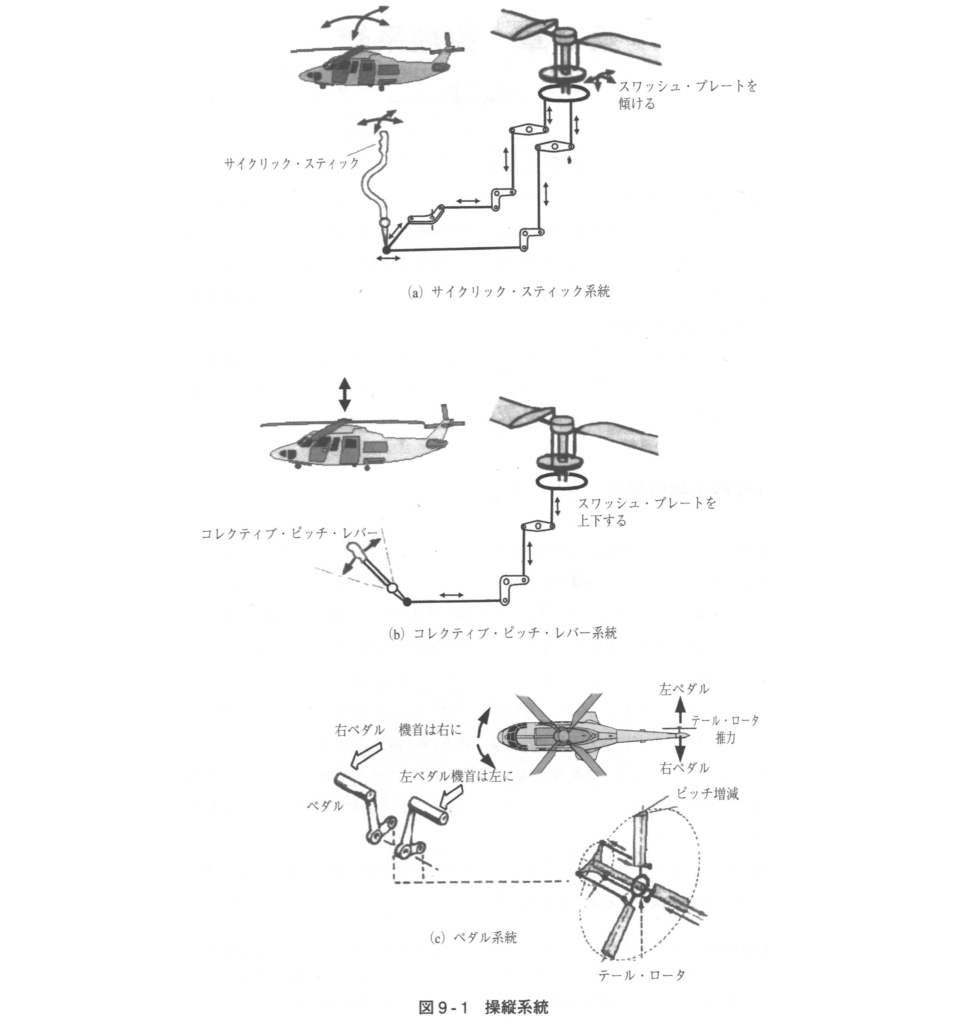
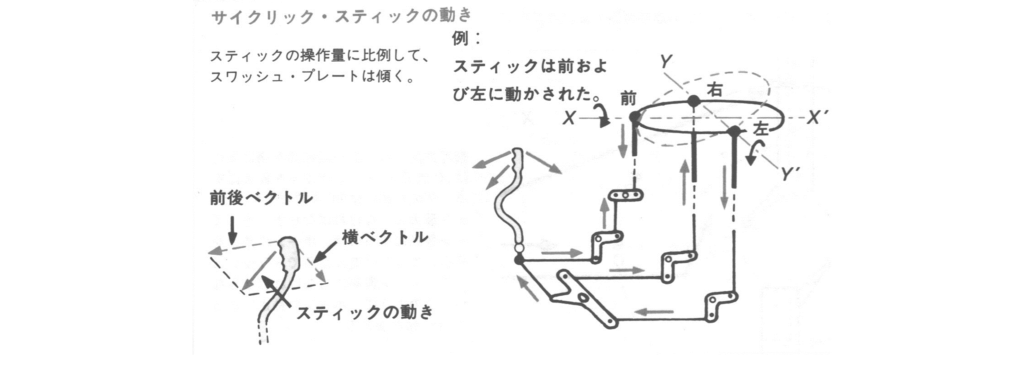
スワッシュプレートの上下および傾きは,それぞれ操縦席のコレクティブピッチレバーおよびサイクリックスティックと連動している
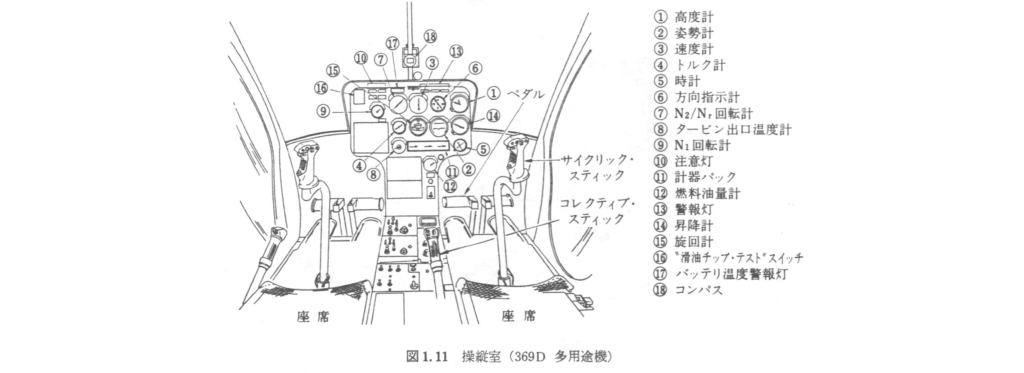
パイロットは,コレクティブピッチレバーを操作することで推力の大きさを調整し,サイクリックスティックを操作することでローターの回転面の傾きを調整している
ところで以下の点に注意
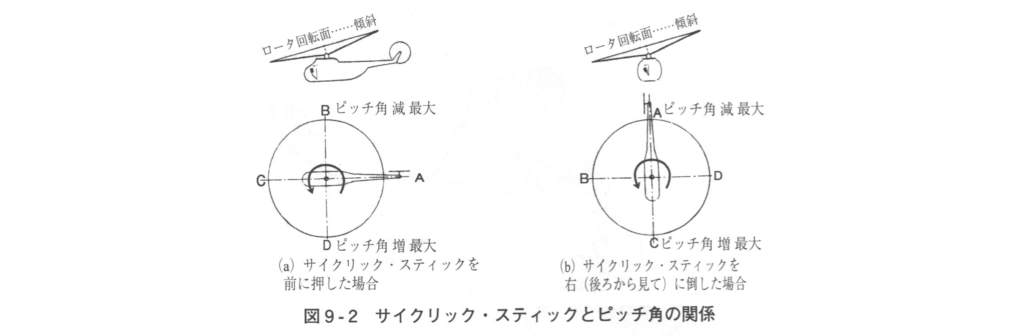
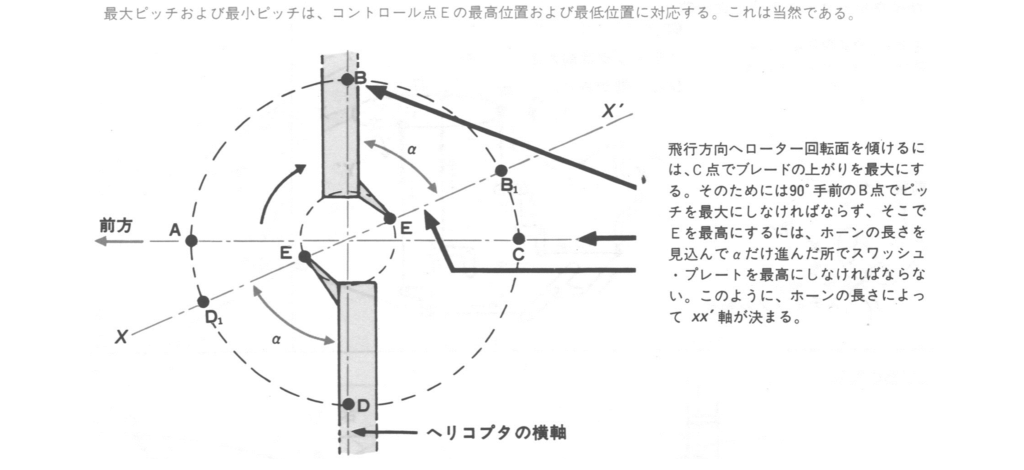
- 空力的な理由から,ブレードのピッチ角が最大になる点とブレードのフラッピング角が最大になる点はローター回転方向に90度遅れる
- ヒンジのホーンの長さによって,スワッシュプレートの傾きが最大になる点とブレードのピッチ角が最大になる点はずれる
- サイクリックスティックの動きとローター回転面の動きは一致するが,スワッシュプレートの傾きとは必ずしも一致しない
つまり,サイクリックスティックをまっすぐ前に倒すと,進行方向に向かって左側でブレードのピッチ角が最大になり,ローター回転面が前傾するが,スワッシュプレートも同様に前傾しているかどうかはヒンジのホーンの長さによる
たぶん図を見るだけだとよくわからないと思うので,RCヘリとかを買って実物を観察するか,3DCADでモデリングをするといいと思う
仕組み
詳細な構造
操縦桿の操作とスワッシュプレートの動き
操縦桿の操作とローター回転面の動き
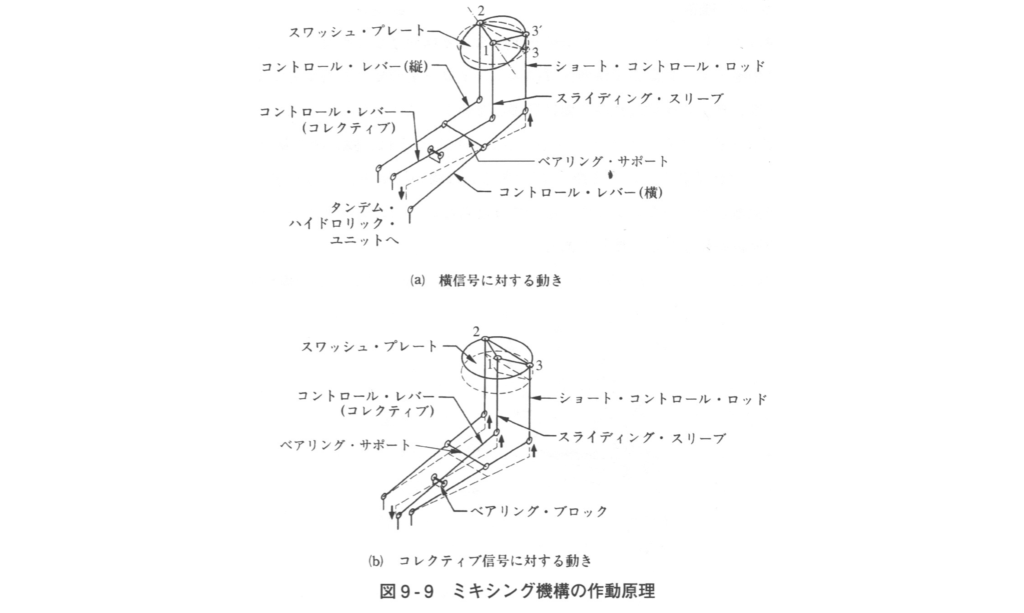
コレクティブピッチとサイクリックピッチのミキシング機構
ブレードのピッチ角最大の点とスワッシュプレートの傾き最大の点の位置関係
- メインローターはヘリコプターで最も重要な部品
- 上昇/下降,前後左右への移動,ピッチアップ/ダウン,左右へのロール,加速/減速,速度安定,上反角安定を担う
- ローターブレード,ヒンジ(フラッピング/ドラッグ/フェザリング),ハブ,シャフト,スワッシュプレートで構成される
- ヒンジとスワッシュプレートによってブレードピッチ角を一様/周期的に変化させる
- サイクリックスティックを倒した向きにローター回転面が傾く
- コレクティブピッチレバーによってローターの推力を調整する
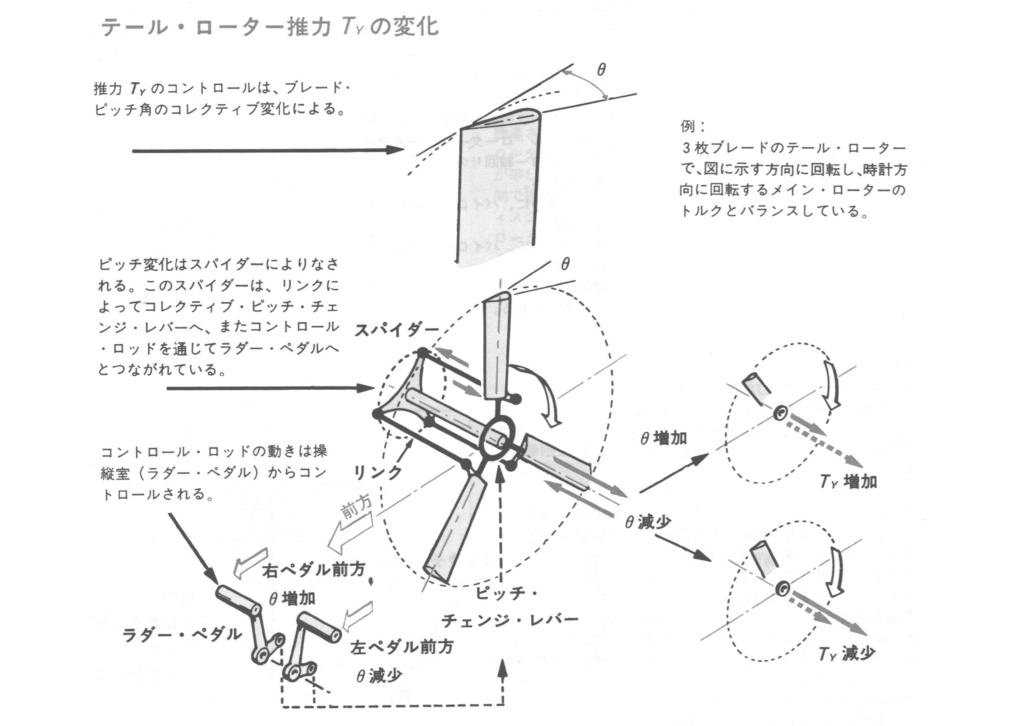
テールローター
ヘリコプターの尾部についている小さなローターで,メインローターの回転による反トルクを打ち消すための部品
また,機種の向きを変えるのに使われたり,風見安定があったりするので,固定翼機における垂直尾翼のようなものでもある

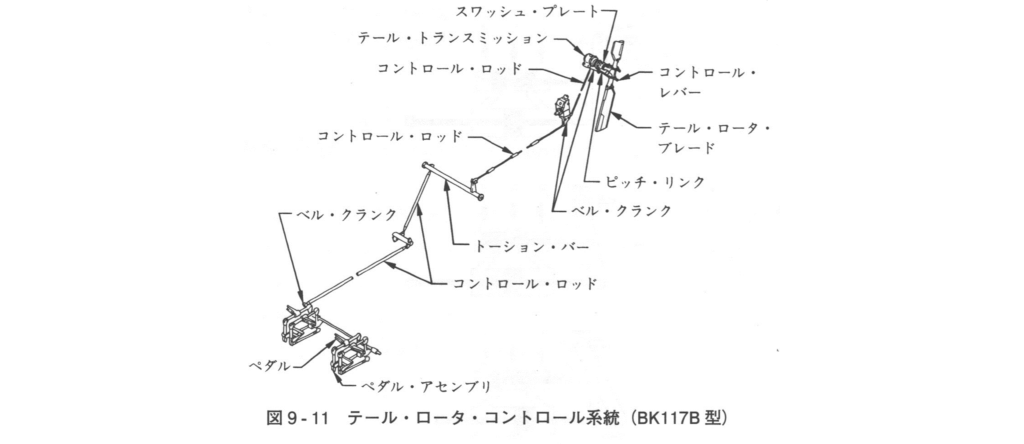
操縦席のラダーペダルを踏むことによってコレクティブピッチが変化し,推力を調整することができる
テールローターのブレードの回転方向は,メインローターに近い方のブレードが上がる向きである
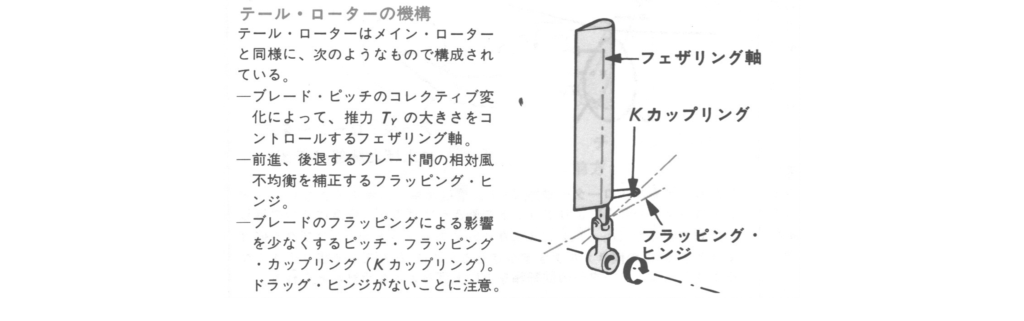
基本的な構造はメインローターと同じだが,次の点が異なる
- デルタスリーヒンジがついている
- ドラッグヒンジがついていない
- サイクリックピッチがついていない(ローター回転面を傾ける必要がないため)
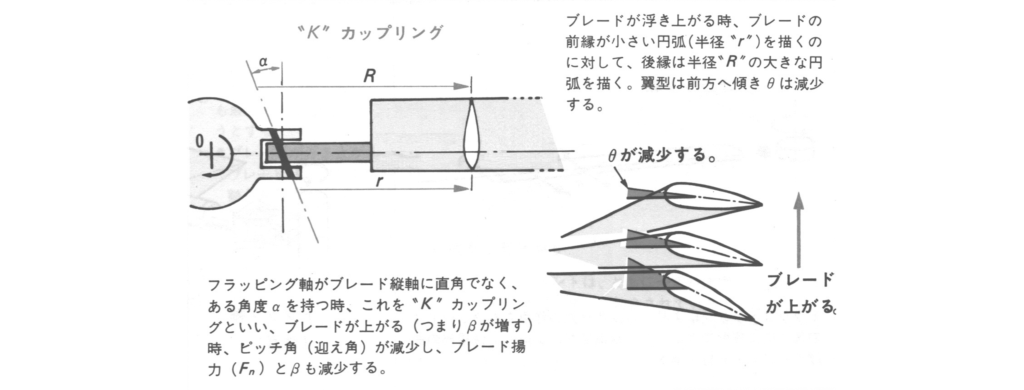
デルタスリーヒンジはフラッピングヒンジの回転軸の角度をずらしたヒンジのことで,フラッピング運動とフェザリング運動を連成させる効果がある
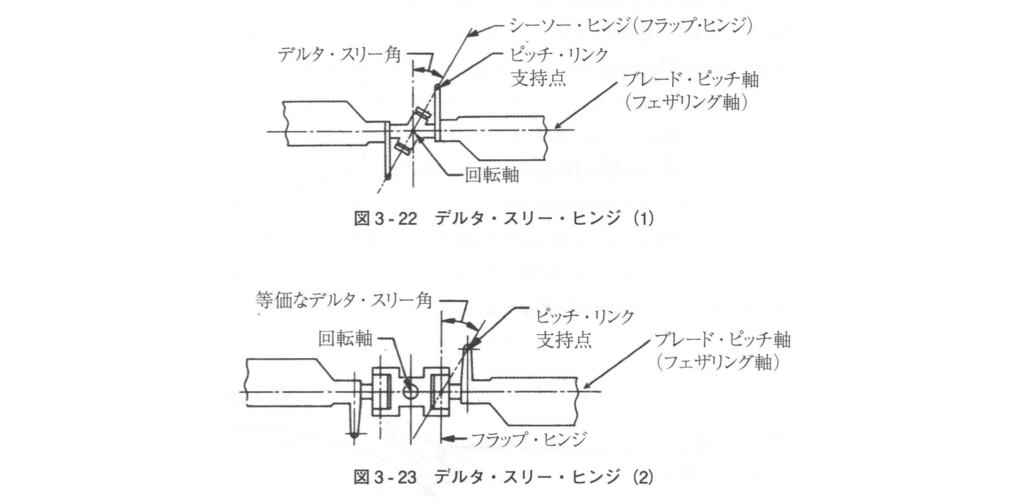
デルタスリーヒンジのブレードがフラッピングすると,ブレードのピッチ角を小さくするようなフェザリング運動が連成されるため,結果的にフラッピング角を小さく抑えることができる
フラッピング角が小さくなることでブレードにはたらくコリオリ力も小さくなるため,ドラッグヒンジをつける必要もなくなる
また,(角速度)×(ローター半径)で表される翼端速度はメインローターとだいたい同じになるように設計される
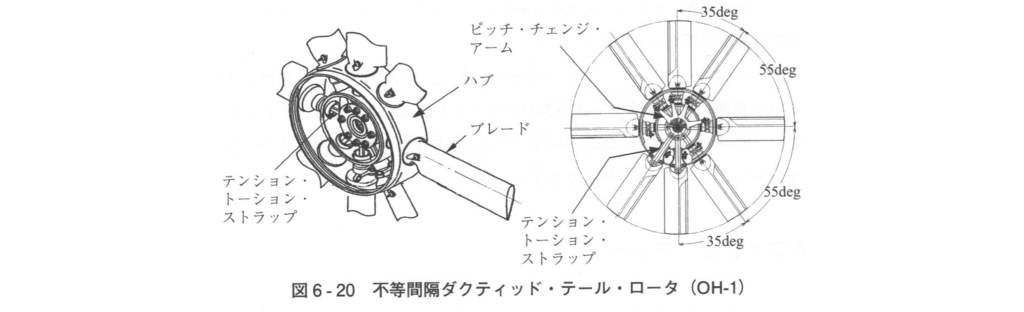
フェネストロン
テールローターブレードの進化系
垂直安定板の中にテールローターを埋め込む必要があるため,ブレードの枚数は6枚から24枚と多くなる
メリットは以下の通り
- ダクトによって,テールローターブレードに対して垂直な流れをあてることができる
- 効率が良く,フラッピングヒンジが必要ない
- 静音性が高い
- 地上での作業時の安全性が高まる
フェネストロンはエアバスヘリコプター図の商標名称で,より一般的にはダクテッドファンである
↓参考

- テールローターはヘリコプターの尾部についている小さなローター
- メインローターの反トルクの相殺,方向の操縦と安定性を担う
- 操縦席のラダーペダルを踏むとコレクティブピッチ角が変化し,推力が増減する
- ドラッグヒンジとサイクリックピッチ機構がついていない
- デルタスリーヒンジが用いられる
- フェネストロンという進化系が存在する
ちなみに,メインローターの反トルクを相殺し,さらに方向の操縦も行える機構は,テールローター以外にもたくさんある
同軸反転ローター
〇 上下のローターを逆方向に回転させてトルクを相殺する
〇 上下のローターのトルク差で方向の操縦を行う
〇 テールブームが必要ないので全長が短くなる
〇 エンジンパワーをすべて推力に使うことができる
× 構造が複雑になる
× オートローテーション中は方向の操舵が逆効きになる
↳ 大きなラダーを装備する必要がある

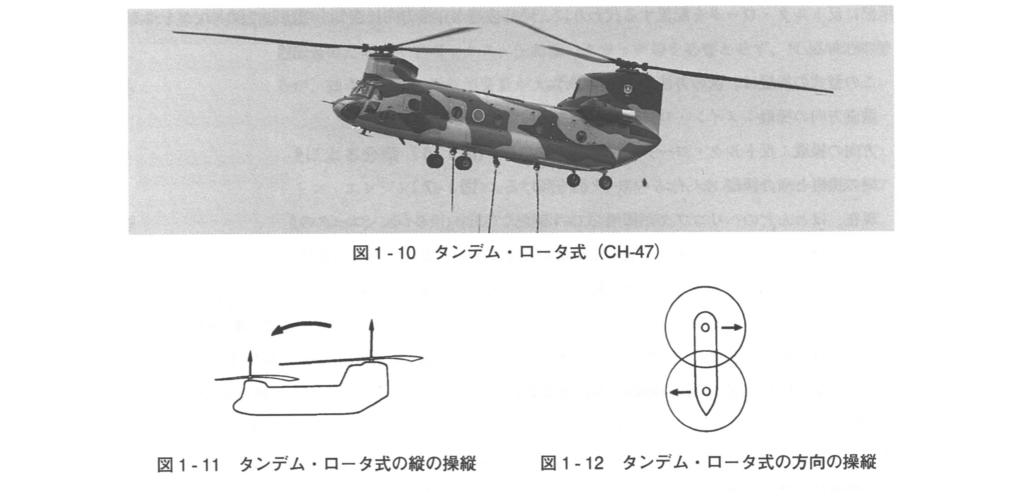
タンデムローター
〇 前後のローターを逆方向に回転させてトルクを相殺する
〇 前後のローターを左右逆方向に傾けることで方向の操縦を行う
〇 縦の操縦は前後のローターの推力差で行うので,大きな操舵力が得られる
〇 前後の重心位置の許容範囲が広い
〇 胴体のほとんどを客室あるいは貨物室にできる
× 構造が複雑になる
× 尾翼が装備できない(装備しても効きが弱い)
↳ 安定性が低い
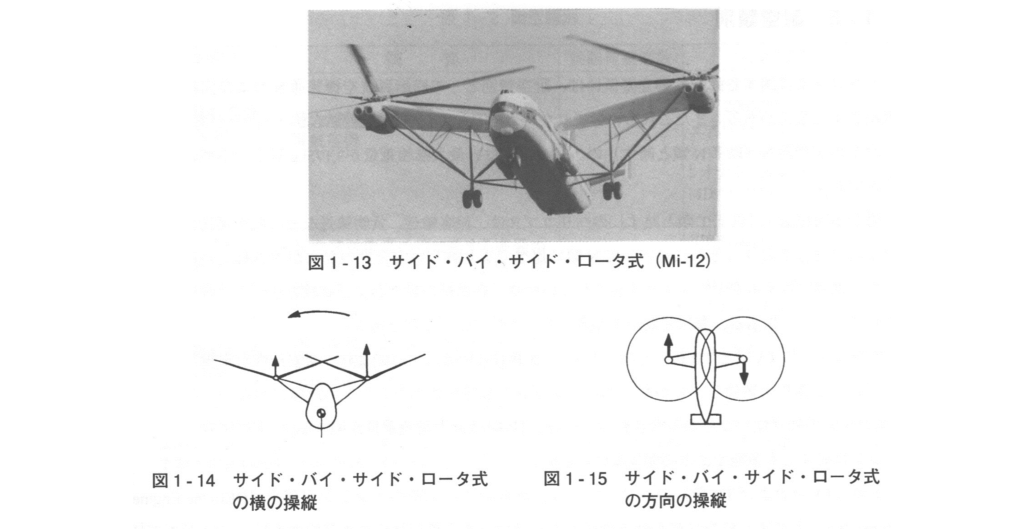
サイドバイサイドローター
〇 左右のローターを逆方向に回転させてトルクを相殺する
〇 左右のローターを前後逆方向に傾けることで方向の操縦を行う
〇 横の操縦は左右のローターの推力差で行うので,大きな操舵力が得られる
〇 左右の車輪の間隔を広くとれるので地上での安定性が高い
× 構造が複雑になる
× 左右のローターを支える構造により重量が増加し,空気抵抗が大きくなる
コンパウンドヘリコプター
〇 左右のプロペラの推力差でメインローターの反トルクを相殺する
〇 左右のプロペラの推力差で方向の操縦を行う
〇 左右のプロペラで前進推力を生み出し,小翼で揚力の一部を負担する
↳ メインローターの回転数を落とすことができ,従来ヘリコプターよりも高速で飛行できる


水平安定板/垂直安定板
機体の尾部についている小さな2つの翼
それぞれ,前進飛行時の機体の安定性を高めるために搭載される
※ホバリング時は\(V=0\)なので安定板の効果はない
水平安定板の効果は以下の通り
- 前進飛行時の迎角安定と縦のダンピングを高める
垂直安定板の効果は以下の通り
- エンジンが完全に停止したときでも方向安定を確保する
- 取り付け角を与えることでメインローターの反トルクを軽減する
- 水平安定板の翼端に取り付けることで性能を向上させる(翼端版)
- 水平安定板/垂直安定板はそれぞれ,前進飛行時の縦/方向の安定性を高める役割を担う
胴体
パイロットが乗り込んだり,エンジンやトランスミッション,ペイロードを搭載する構造
メインローターの反トルクとテールローターのトルクを伝達する役割も持つ
残念ながら教科書的な空力のお話のときにはだいたい存在しないことにされる
哀しい存在である
おわりに
この記事では,ヘリコプターの飛行力学を理解できるようになるために最初に理解しておくべきヘリコプターの構造の概要について説明した
- ヘリコプターはメインローター,テールローター,水平/垂直安定板,胴体で構成される
- メインローターはヘリコプターに必要なほぼすべての役割を担う重要な部品である
- テールローターはメインローターの反トルクを打ち消し,方向の操縦と安定性を担う
- 水平/垂直安定板は前進飛行時のヘリコプターの縦/方向の安定性を高める
- 胴体はだいたい無視される(ドンマイ)
次回からはいよいよヘリコプターの飛行力学について説明していく
↓関連記事

コメント