ヘリコプターのローターにはたらく2つのジャイロ効果について説明する
はじめに
ヘリコプターは回転するローターによって飛行しているため,ジャイロ効果の影響を受ける
ヘリコプターのジャイロ効果には以下の2種類がある
- ローター回転面内の力の不均衡によるもの
- ローターブレードの慣性力によるもの
一般的なジャイロ効果(独楽が安定して回転する原理など)は2つ目の方で,1つ目はヘリコプターのローターにしかない特性である
2つのジャイロ効果は原理も現象も異なるが,書籍などでは単に「ジャイロ効果」としてまとめられることが多い
この記事では,2つのジャイロ効果の原理と現象について説明する
↓今回の記事の参考文献
それではいってみよう
ローター回転面内の力の不均衡によるジャイロ効果
1つ目のジャイロ効果は,「メインローターを傾けるような力の不均衡」に対して「実際にメインローターが傾く向き」はブレードの回転方向に90度遅れる,というものである
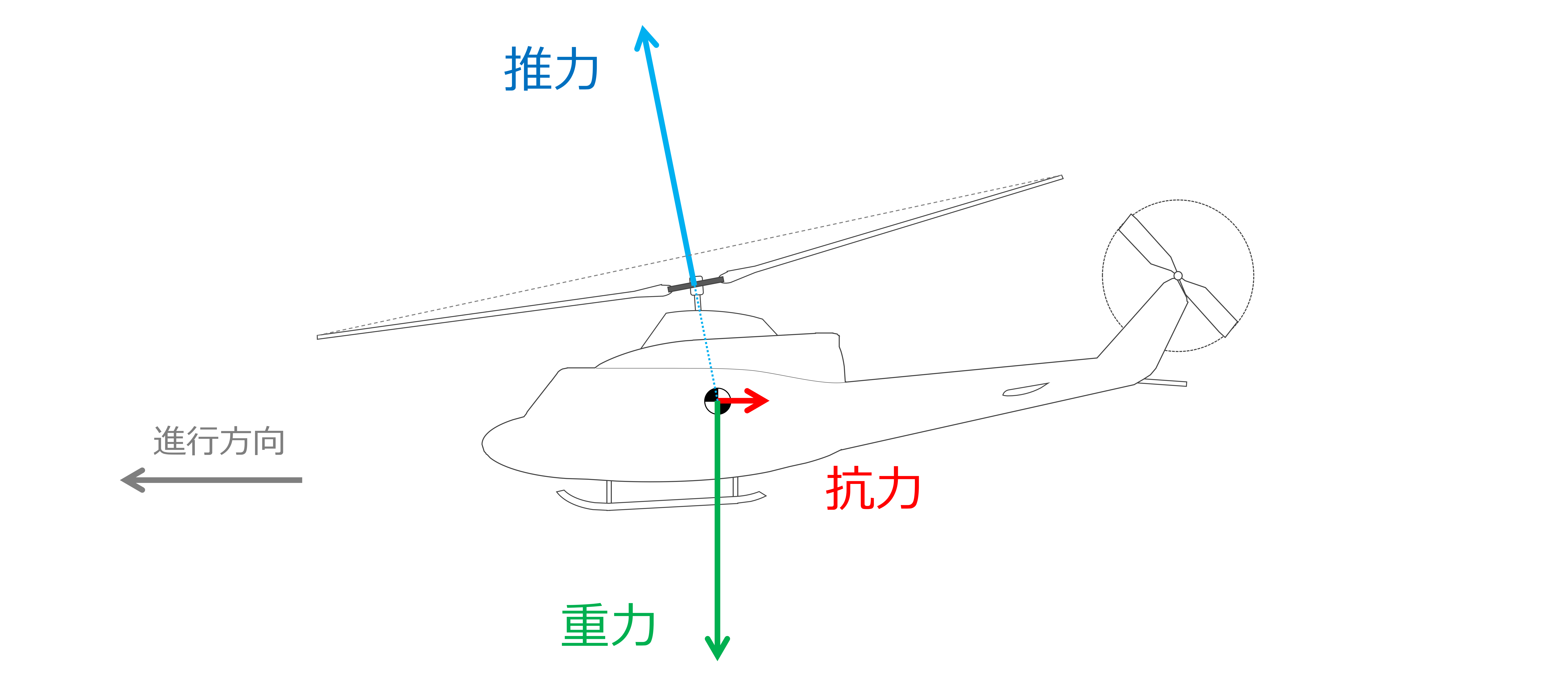
例えば,下の図のように進行方向に対して右側のブレードの揚力が大きく,左側のブレードの揚力が小さくなった場合を考える
メインローターブレードには左側に傾けられるようなモーメントがかかっているのだが,実際にはブレードは左に傾くのではなく,後ろに傾く
左に傾くはずのメインローターがブレードの回転方向に90度遅れて後ろに傾く,これがローター回転面内の揚力の不均衡によるジャイロ効果である
それでは原理について説明していく
原理の説明
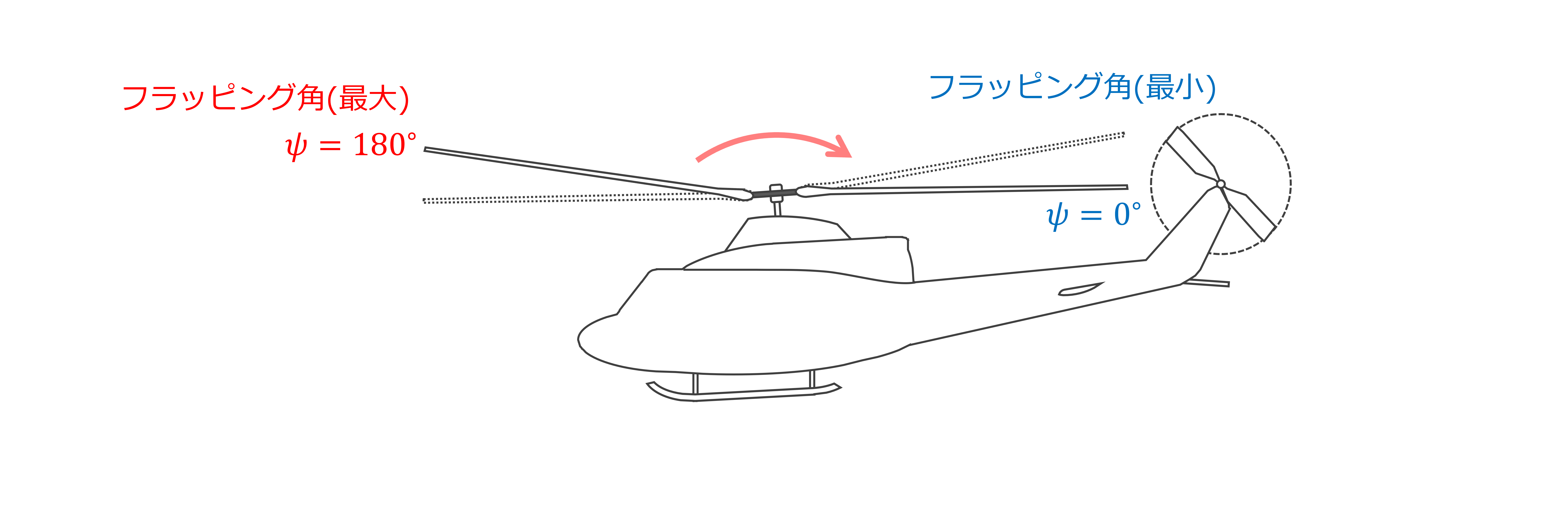
ローターブレードは,根元のフラッピングヒンジによって自由に上下運動(フラッピング運動)が可能である
1回転の間にブレードにはたらく力が変化すると,ブレードは力の変化をゼロにする方向にフラッピングする
結果として,「メインローターを傾けるような力の不均衡」に対して「実際にメインローターが傾く向き」はブレードの回転方向に90度遅れる
ローターブレードの根元は下図のように3つのヒンジで接続されており,そのうちフェザリング軸はブレードのピッチ角(取り付け角)変化,フェザリング軸はブレードの上下運動を可能にしている
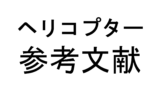
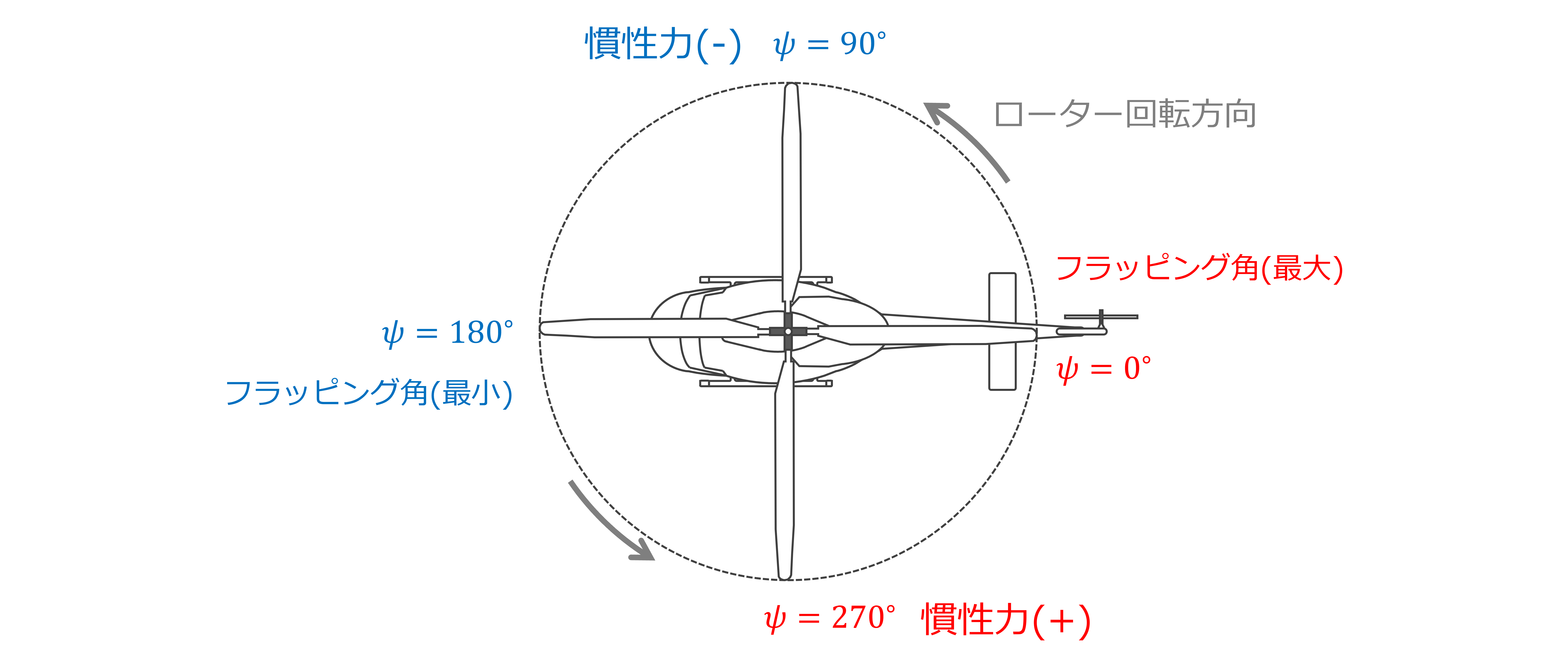
ローターブレードの位置を位相角\(\psi\)を用いて次のように定義する
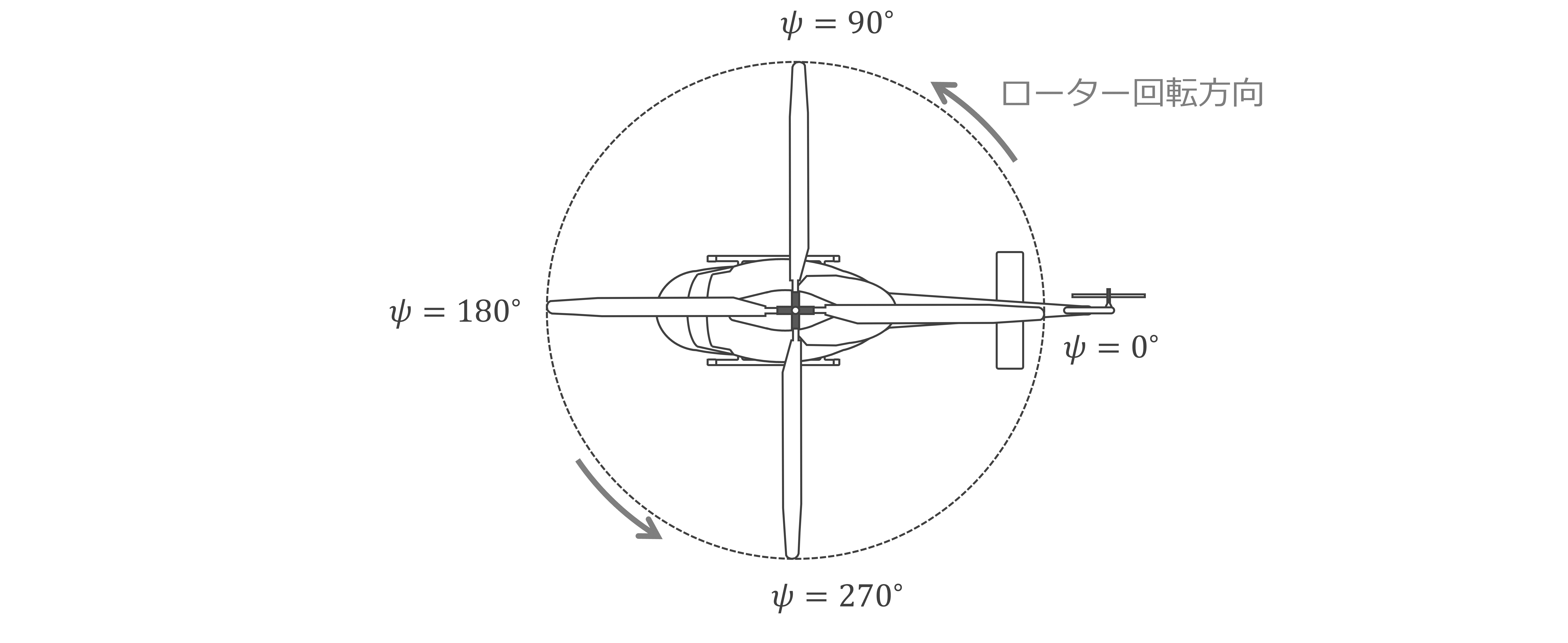
ここで,\(\psi=90^\circ\)の位置のブレードを「前進側のブレード」,\(\psi=270^\circ\)の位置のブレードを「後退側のブレード」という
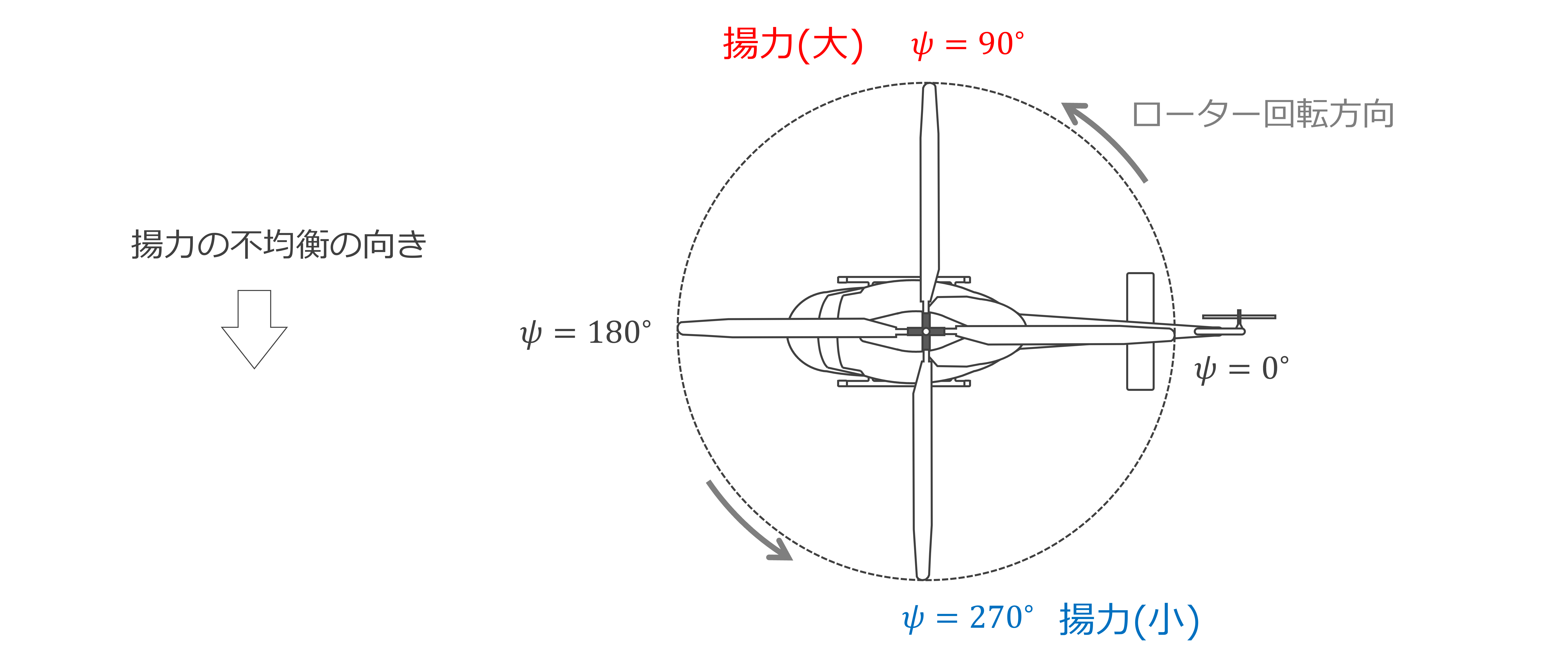
このとき,何らかの要因で前進側のブレードの揚力が増加し,後退側のブレードの揚力が減少したとすると,揚力の不均衡の向きは\(\psi=270^\circ\)の方向になる
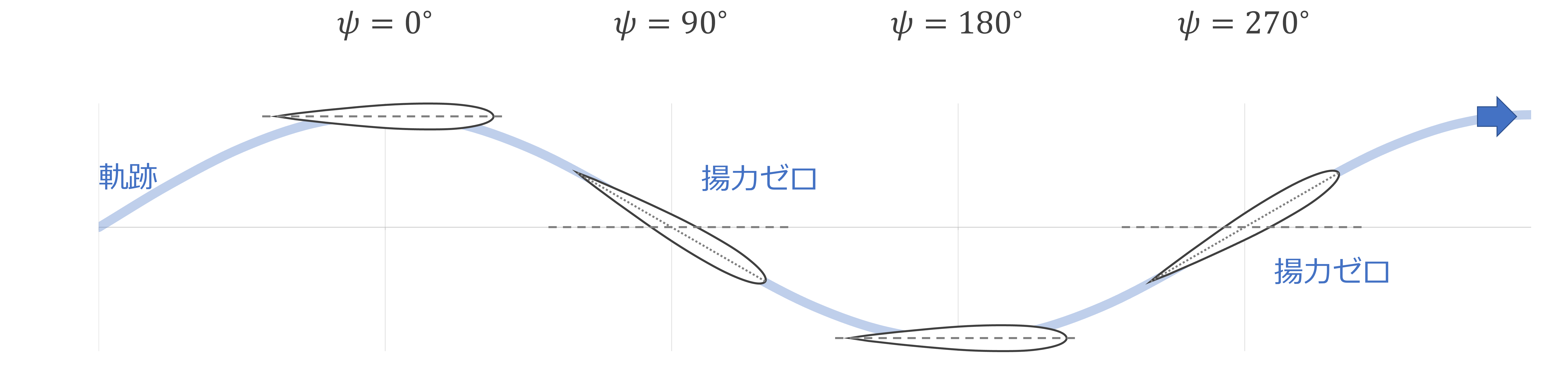
1つのブレードが1回転する間の揚力変化は下の図のようになる(ブレードの外側からみる)
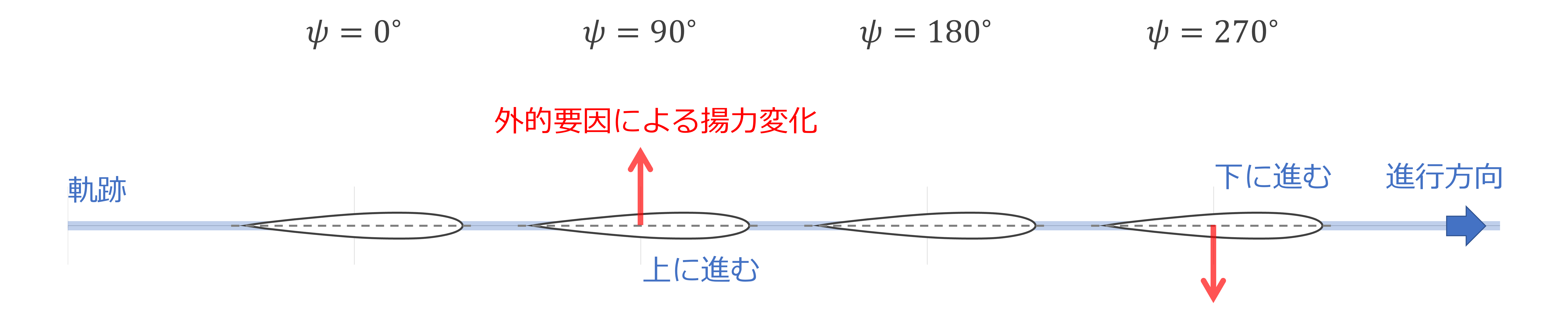
ローターブレードは根元のフラッピングヒンジによって上下に自由に動くことができるため,\(\psi=90^\circ\)のブレードは上向きに進行方向を変え,\(\psi=270^\circ\)のブレードは下向きに進行方向を変える
この運動によってローターブレードの軌跡はすこしずつ変化していき,それにともなって\(\psi=90^\circ\),\(\psi=270^\circ\)のブレードに,迎角(ピッチ角と経路角の差)による揚力変化がはたらいてくる(外的要因による揚力変化とは逆向き)
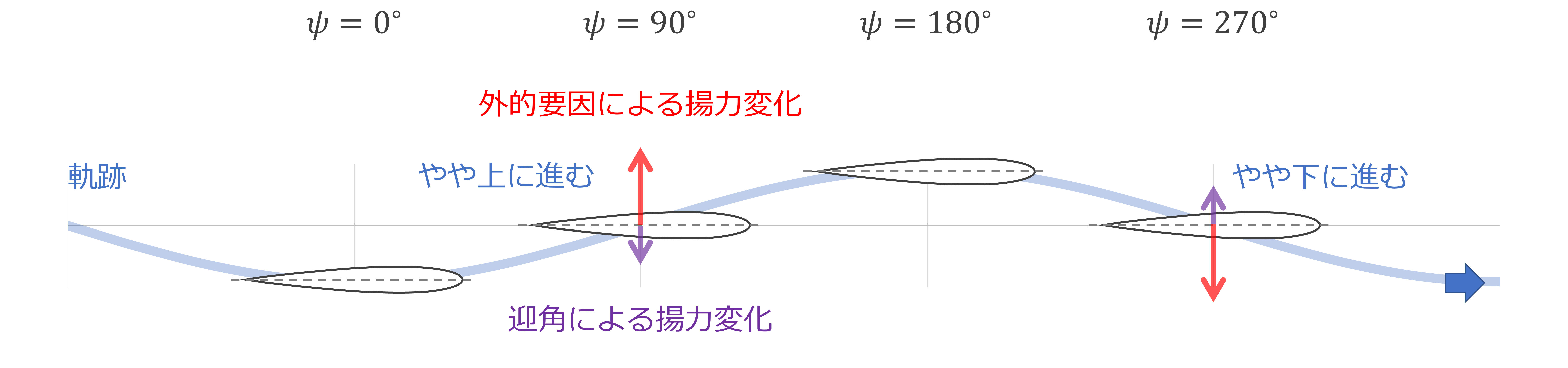
最終的に外的要因による揚力変化と迎角による揚力変化が相殺してゼロになるまでブレードはフラッピング運動を続け、ブレードに対するトータルの揚力変化がゼロになった時点で回転が安定する
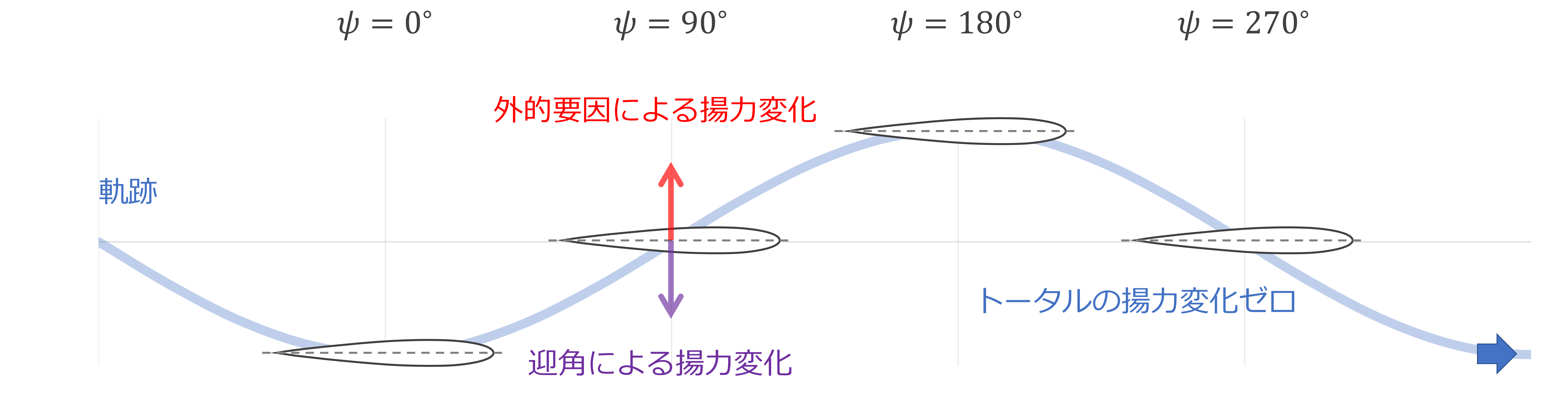
ブレードの揚力変化が1回転を通してゼロになったということは,外的要因によって生じた回転面内の揚力の不均衡が,回転面自体が傾くことによって解消されたことになる
ローター回転面内に揚力の不均衡が生じたときの位相角,外的要因による揚力変化,フラッピング角の関係をまとめると次の表のようになる
| 位相角\(\psi\) | \(0^\circ\) | \(90^\circ\) | \(180^\circ\) | \(270^\circ\) |
| 外的要因による揚力変化 | - | 増加 | - | 減少 |
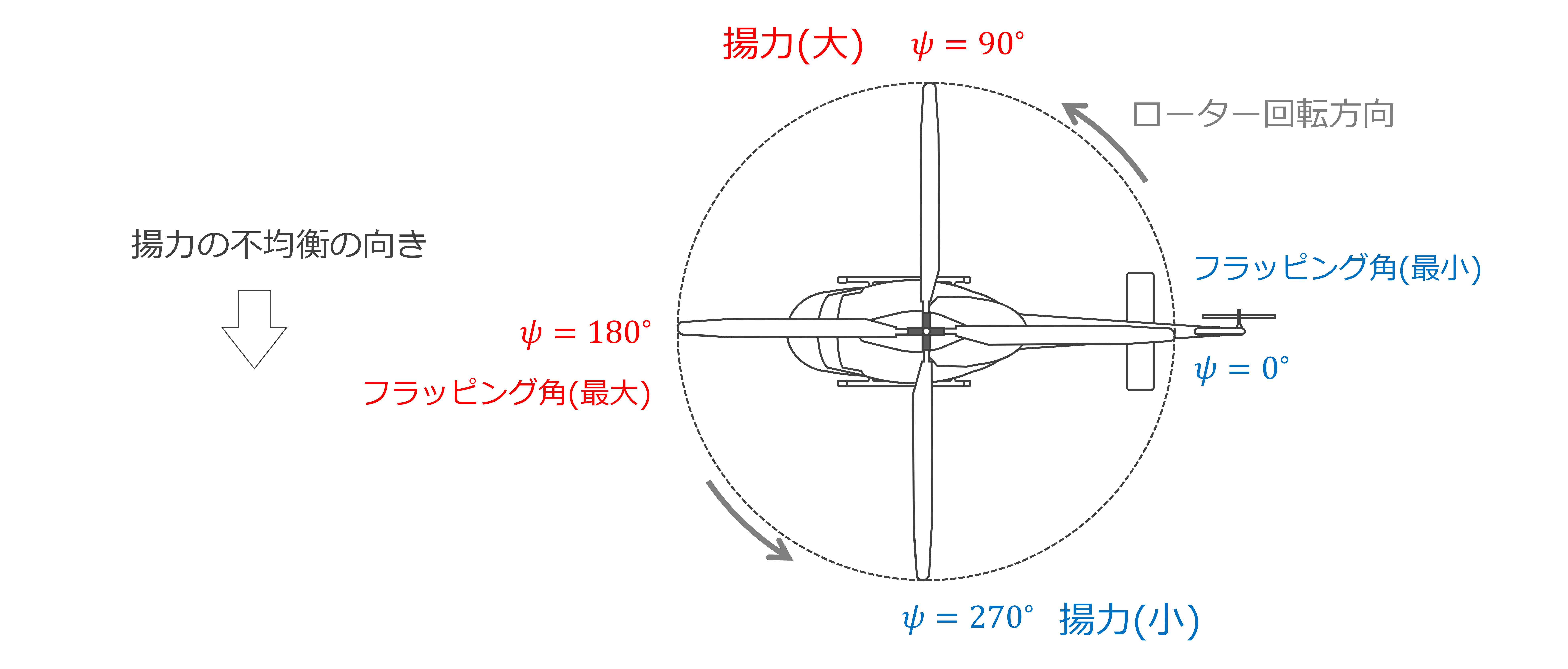
| フラッピング角 | 最小 | - | 最大 | - |
揚力の増加/減少の位置に対してフラッピングの最大/最小の位置がブレードの回転方向に90度遅れていることが分かる
今回の例のように,\(\psi=90^\circ\)で揚力が増加し,\(\psi=270^\circ\)で揚力が減少するような揚力の不均衡が生じると,ローター回転面は揚力不均衡の向き(\(\psi=270^\circ\))からブレード回転方向に90度遅れた向き(\(\psi=0^\circ\))に傾く
すなわち,ローター回転面は後傾することになる
サイクリックスティック操作によるジャイロ効果
ローター回転面内の揚力の不均衡によるジャイロ効果は,ヘリコプターの操縦にも使われている
- サイクリックスティックを操作すると,ローターブレードのピッチ角が周期的に変化し,ローター回転面内に揚力の不均衡を生じさせることができる
- ジャイロ効果を利用して,メインローター推力を好きな向きに傾けることができる
メインローターの傾きは操縦席のサイクリックスティックの操作と連動している
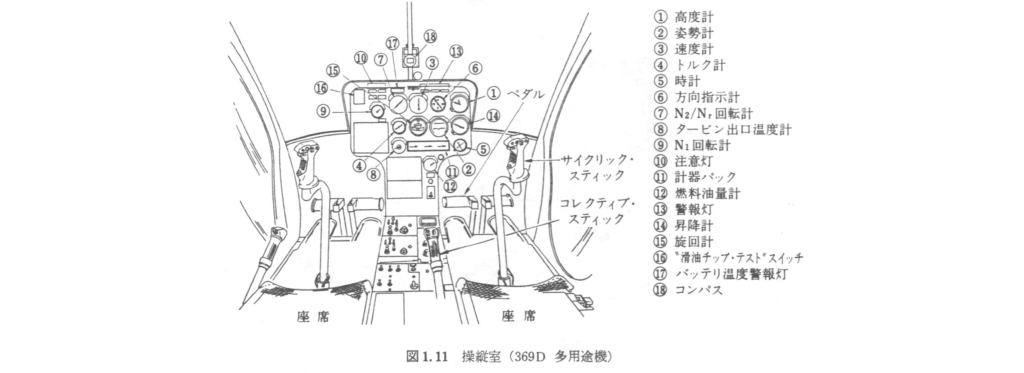
サイクリックスティックを前に倒すとメインローターは前に傾き,サイクリックスティックを左右に倒すとメインローターも左右に傾く
先ほどと同様に,ローターブレードの位置を位相角\(\psi\)を用いて次のように定義する
このとき,ローターブレードのピッチ角\(\theta\)は次のように表される
\begin{equation}
\theta=\theta_{0}-A_{1}\cos{\psi}-B_{1}\sin{\psi}
\end{equation}
ここで,\(\theta_{0}\)はコレクティブピッチ角,\(A_{1}\)は横サイクリックピッチ角,\(B_{1}\)は縦サイクリックピッチ角という
例えば,メインローター推力を前方に傾けようとしてサイクリックスティックを前に倒すと,\(A_{1}=0\),\(B_{1}>0\)となり,ブレードのピッチ角は次のようになる
\begin{equation}
\theta=\theta_{0}-B_{1}\sin{\psi}
\end{equation}
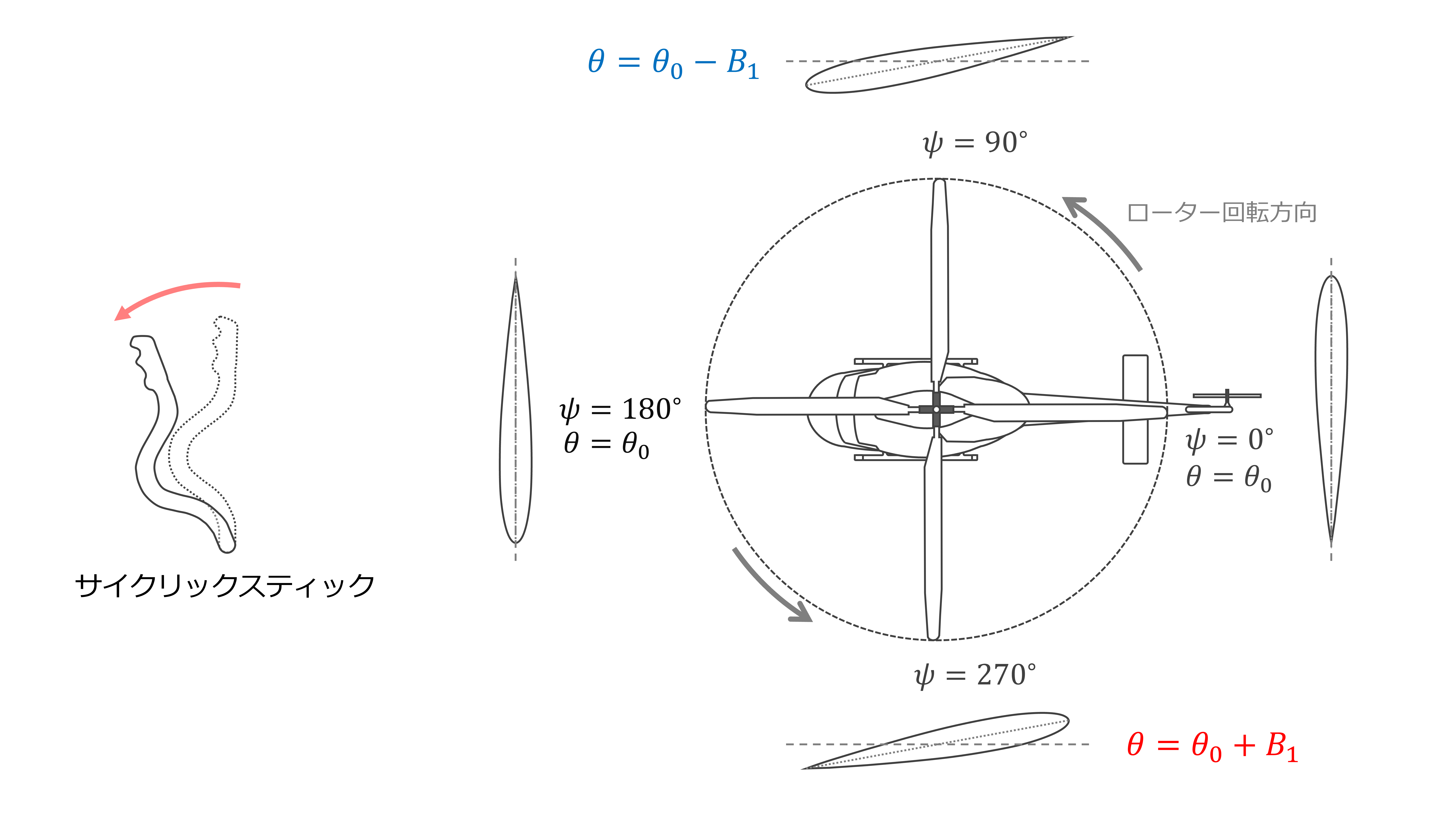
このとき,1つのブレードが1回転する間のピッチ角の変化は下の図のようになる(ブレードの外側からみる)
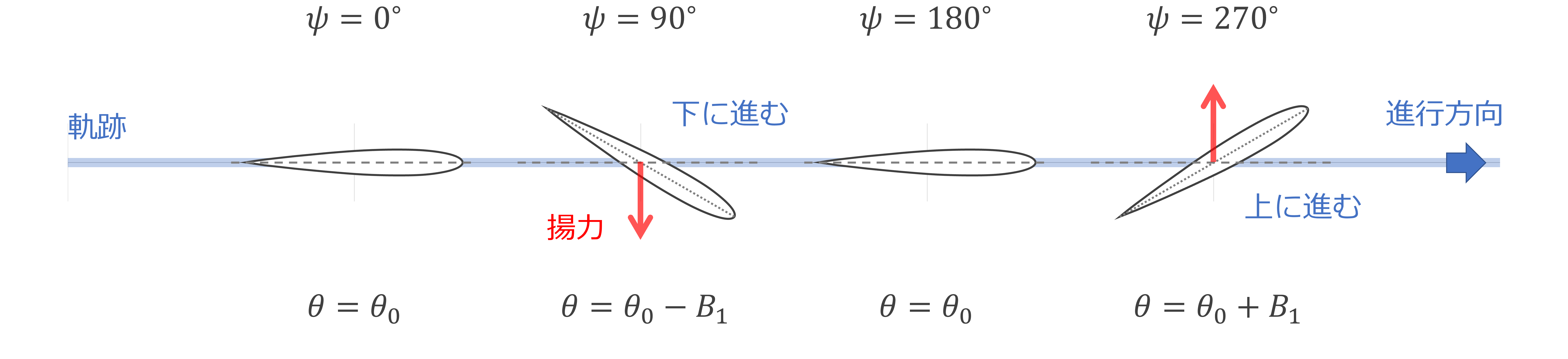
サイクリックスティックを前に倒すと\(\psi=90^\circ\)の位置ではブレードに下向きの揚力変化が発生し,\(\psi=270^\circ\)の位置では逆に上向きの揚力変化が発生する
言い換えると,サイクリックスティックの操作によってメインローターの左右に揚力の不均衡を生じさせている状態である
ローターブレードは根元のフラッピングヒンジによって上下に自由に動くことができるため,\(\psi=90^\circ\)のブレードは下向きに進行方向を変え,\(\psi=270^\circ\)のブレードは上向きに進行方向を変える
このフラッピング運動によってローターブレードの軌跡はすこしずつ変化していき,それにともなって\(\psi=90^\circ\),\(\psi=270^\circ\)のブレードの迎角および揚力変化が小さくなっていく

最終的にブレードのピッチ角と経路角が等しくなるまでブレードはフラッピング運動を続け、ブレードの迎角がゼロになった時点で回転が安定する
ブレードの揚力変化が1回転を通してゼロになったので,操縦桿を操作した直後に生じたメインローター回転面内の揚力の不均衡は,メインローターの回転面自体が傾くことによって解消されたことになる
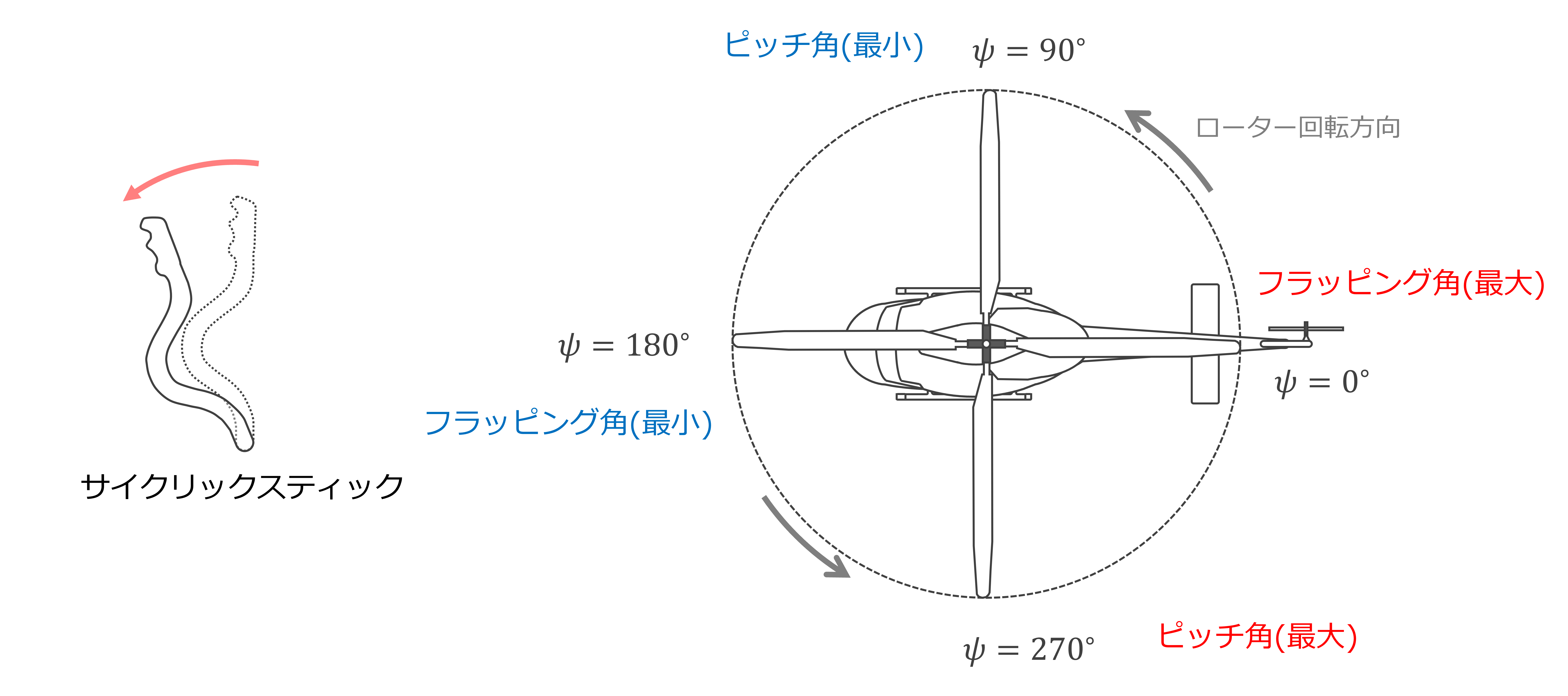
以上より,サイクリックスティックを前に倒したときの位相角,ピッチ角,フラッピング角の関係をまとめると次の表のようになる
| 位相角\(\psi\) | \(0^\circ\) | \(90^\circ\) | \(180^\circ\) | \(270^\circ\) |
| ピッチ角\(\theta\) | 最小 | 最大 | ||
| フラッピング角 | 最大 | 最小 |
ピッチ角の最大/最小の位置に対してフラッピングの最大/最小の位置が「ブレードの回転方向に90度遅れている」ことが分かる
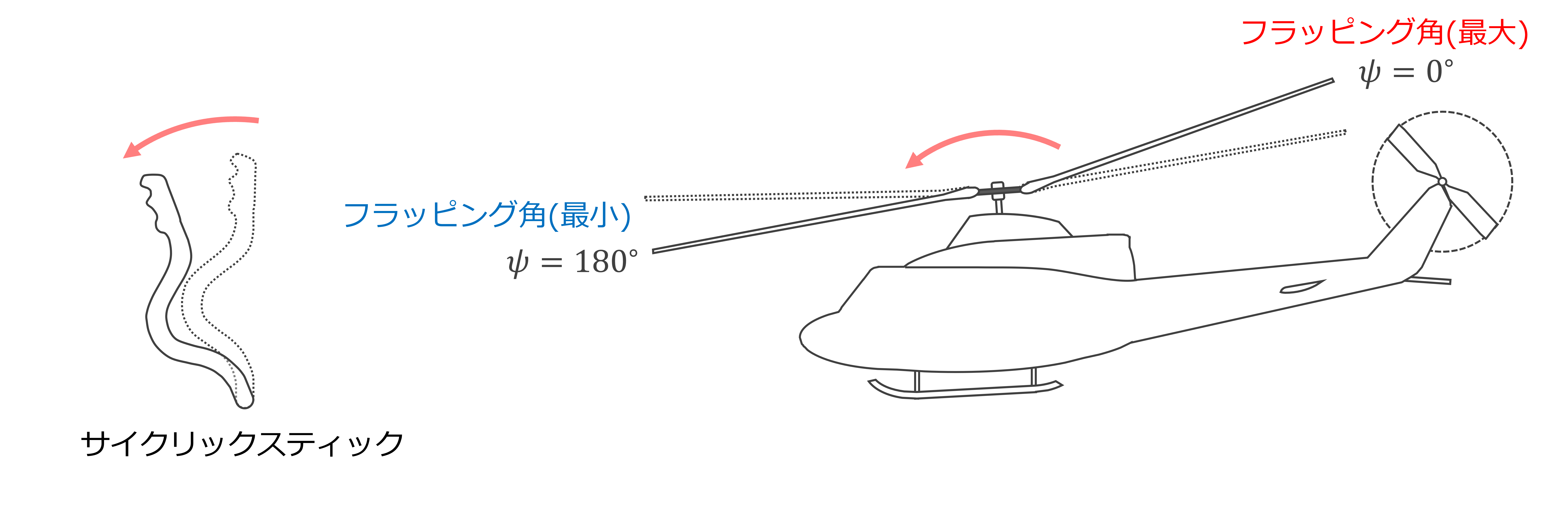
サイクリックスティックを前に倒すと,\(\psi=90^\circ,~270^\circ\)でブレードのピッチ角は最小/最大になり,そこからブレードの回転方向に90度遅れた位置でブレードのフラッピング角が最小/最大になる
結果として,サイクリックスティックを前に倒すとメインローターを前に傾けることができるようになる
サイクリックピッチ (1/2) pic.twitter.com/4mcFB0FwnI
— いーそー (@mtk_birdman) July 10, 2022
サイクリックピッチ (2/2) pic.twitter.com/tfuf2uMASr
— いーそー (@mtk_birdman) July 10, 2022
ブレードの慣性力によるジャイロ効果
2つ目のジャイロ効果は,回転する物体の回転軸が傾けられると,物体の回転方向に90度遅れた方向に回転軸を傾けるような慣性力がはたらく,というものである
こちらはより一般的なジャイロ効果で,ヘリコプターのローターにかかわらず様々なものに発生する
原理の説明
ローターに角速度が加わると,ジャイロ効果によりローター回転面内に力の不均衡が生じる
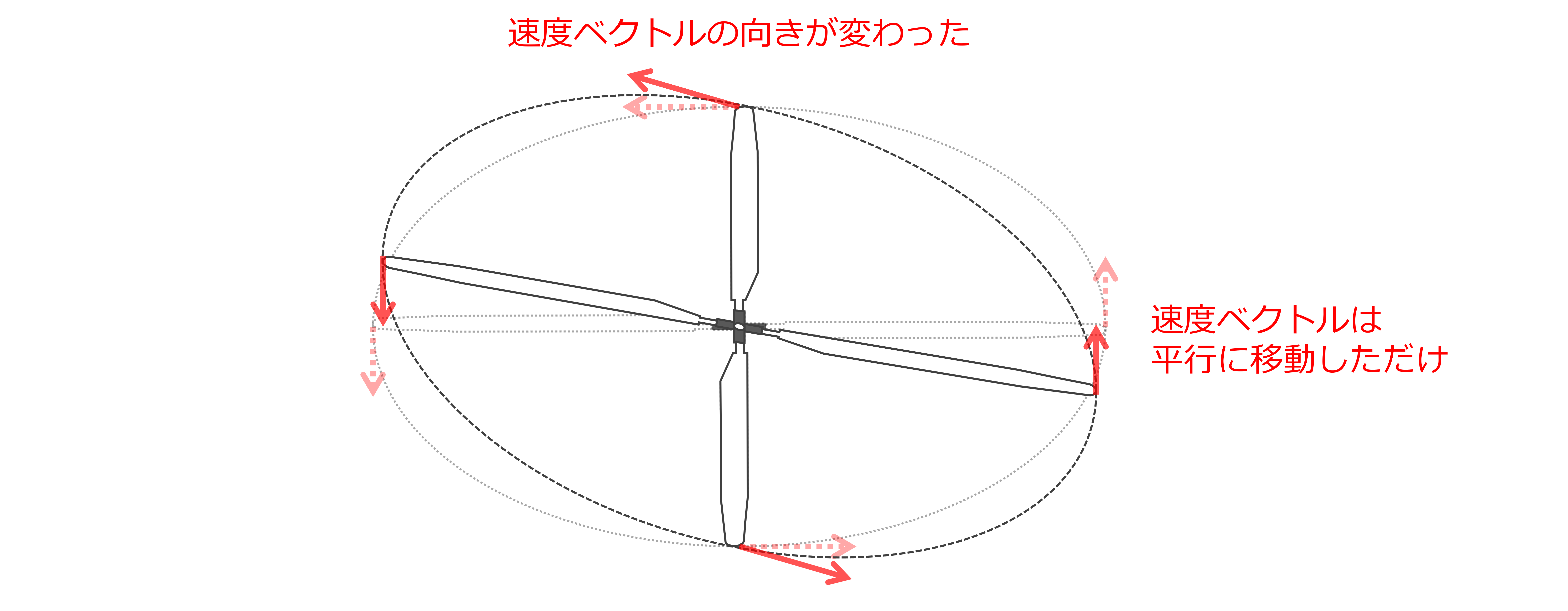
ローターが回転しているとき,ローターブレードの速度ベクトルは以下のようになっている
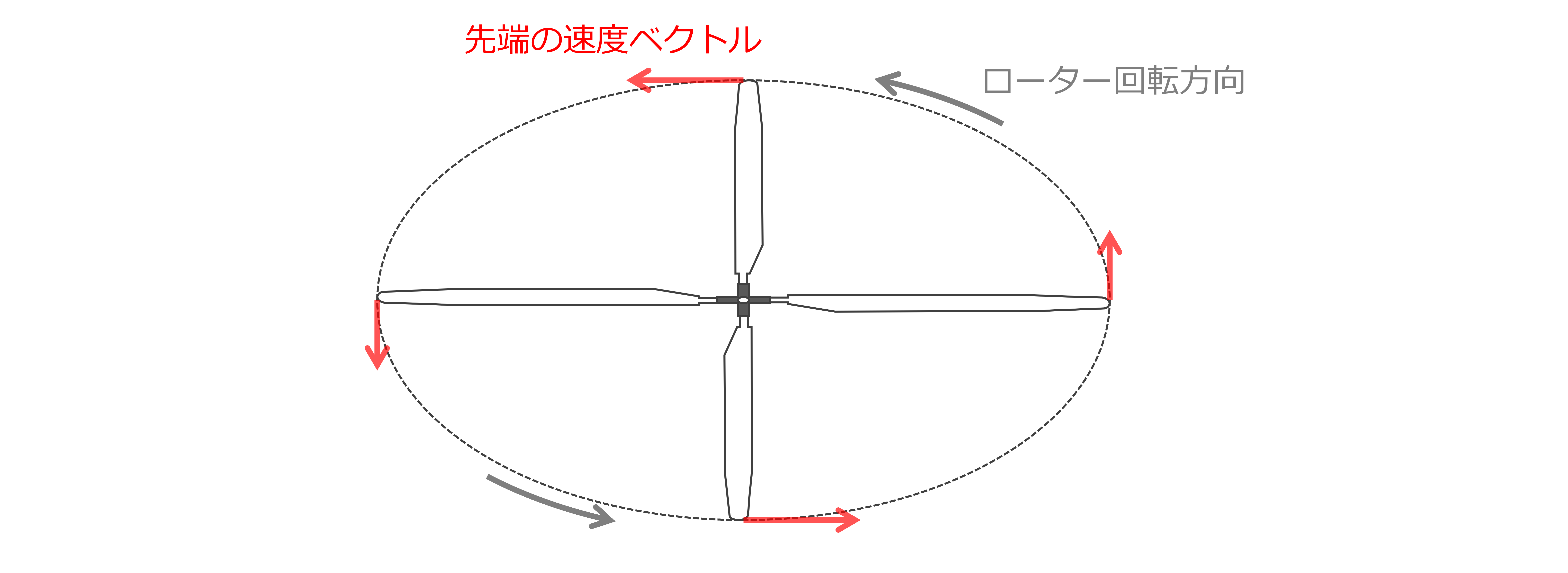
このようなローターが例えば頭上げのピッチング運動を行うと,機首側およびテール側のブレードの速度ベクトルは平行に移動するだけだが,前進側のブレードの速度ベクトルは上向きに,後退側のブレードの速度ベクトルは下向きに偏向させられる
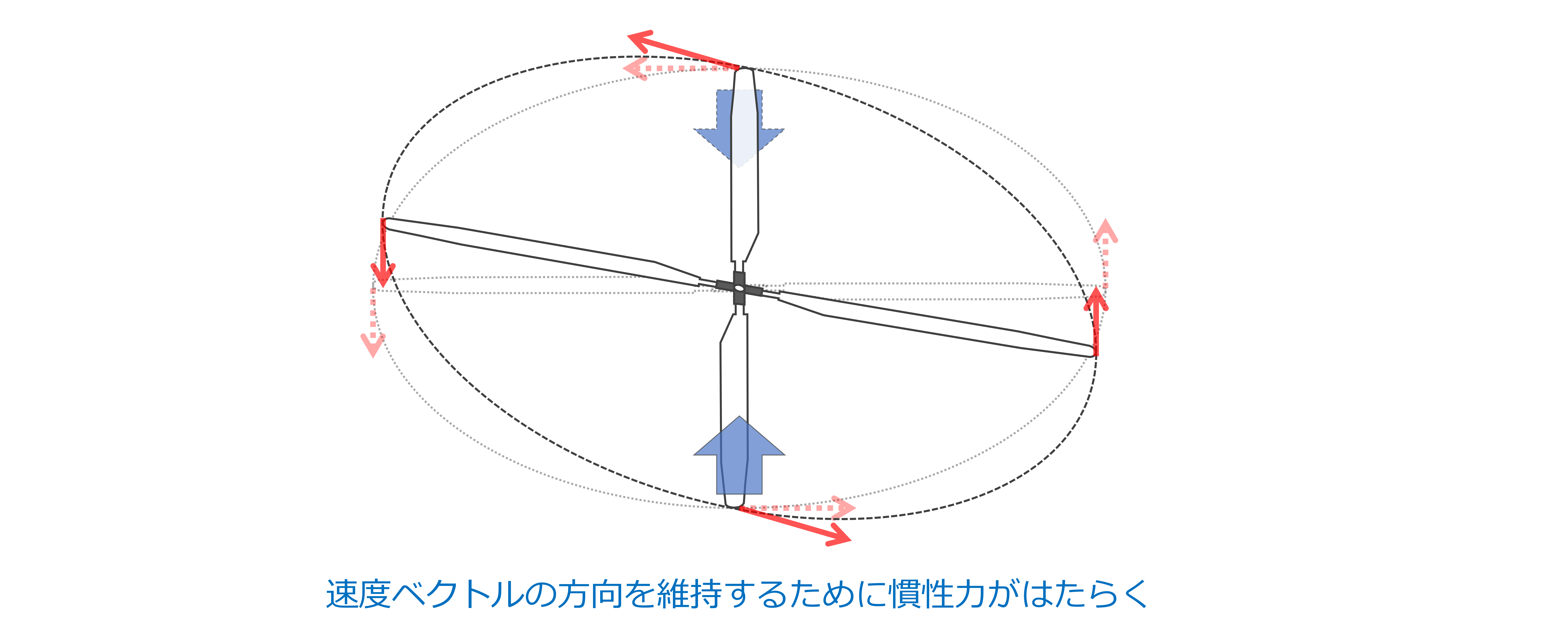
ローターブレードは慣性の法則によってその運動の方向を維持しようとするので,前進側のブレードには下向きの,後退側のブレードには上向きの慣性力が作用する
すなわち,メインローターには右に傾けられるようなモーメントがはたらく
このように,ジャイロ効果によってローター回転面内にはピッチング運動の向きから90度遅れた方向に力の不均衡が生じる
ただし,1つ目のジャイロ効果で説明したように,ヘリコプターのローターは「回転面内に力の不均衡が生じると回転方向に90度遅れた方向に回転面が傾く」という性質を持っている
そのため,メインローターが後ろに傾くとメインローターには右に傾けられるようなモーメントが作用し(慣性力によるジャイロ効果),右に傾けられるような力の不均衡が生じるとメインローターは前に傾く(力の不均衡によるジャイロ効果)
結果として,ローターに頭上げのピッチング加速度が生じると,ローター回転面は前傾し,ピッチング運動を抑えるはたらきをすることになる
おわりに
ヘリコプターにローターにはたらく2つのジャイロ効果について説明した
- ヘリコプターにはたらくジャイロ効果には2種類ある
- 揚力の不均衡によるジャイロ効果は「はたらく力に対して90度遅れて傾く」
- ブレードの慣性力によるジャイロ効果は「傾きに対して90度遅れて力がはたらく」
- これらのジャイロ効果はヘリコプターの操縦や安定性に大きく影響している
↓おすすめ記事
コメント